Score-based Models¶
约 3899 个字 25 张图片 预计阅读时间 13 分钟
Intro¶
在上一个模型Energy-based Models中,我们通过构建score matching来训练EBMs,好处就是我们不再需要关心pdf是否是标准化的(因为不需要计算partition function),只需要考虑梯度:
可以看到右边的梯度曲线,无需考虑面积问题,我们不再使用density来衡量模型,而是使用score
但是可以看到Fisher divergence是一个定义好的函数,不局限在EBM的训练中,所以我们可以将EBM的训练推广到score-based models中
在score-based models中,我们不再考虑一个能量(或者说在EBM的训练目标中\(f_\theta\)是一个标量函数,类似于势能),而是直接构建一个vector field of gradient,这时我们的对象就不仅是标量函数了,而是arbitrary vector fields
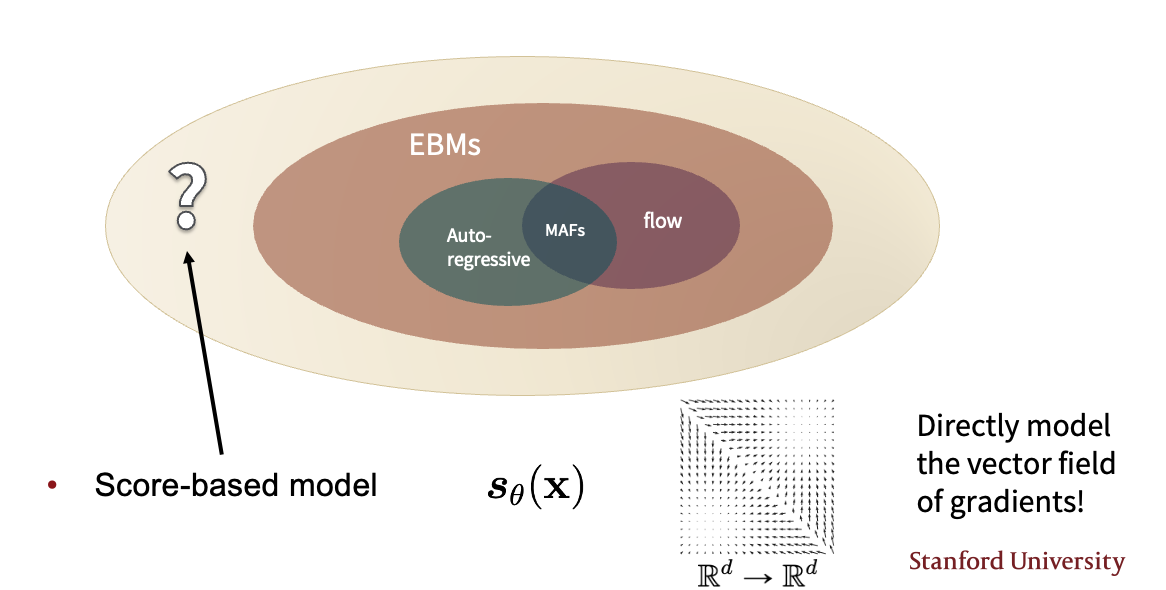
现在我们来重申一下score-based models的任务:
- Given: i.i.d. samples\({x_1, x_2, \cdots, x_n} \sim p_{data}(x)\)
- Task: Estimating the score \(\nabla \log p_{data}(x)\)
- Score Model: A learnable vector-valued function \(s_\theta(x)\)
- Goal: \(s_\theta(x) \approx \nabla \log p_{data}(x)\)
也就是
但是这个式子中的雅各比矩阵的trace很难计算
Not Scalable!
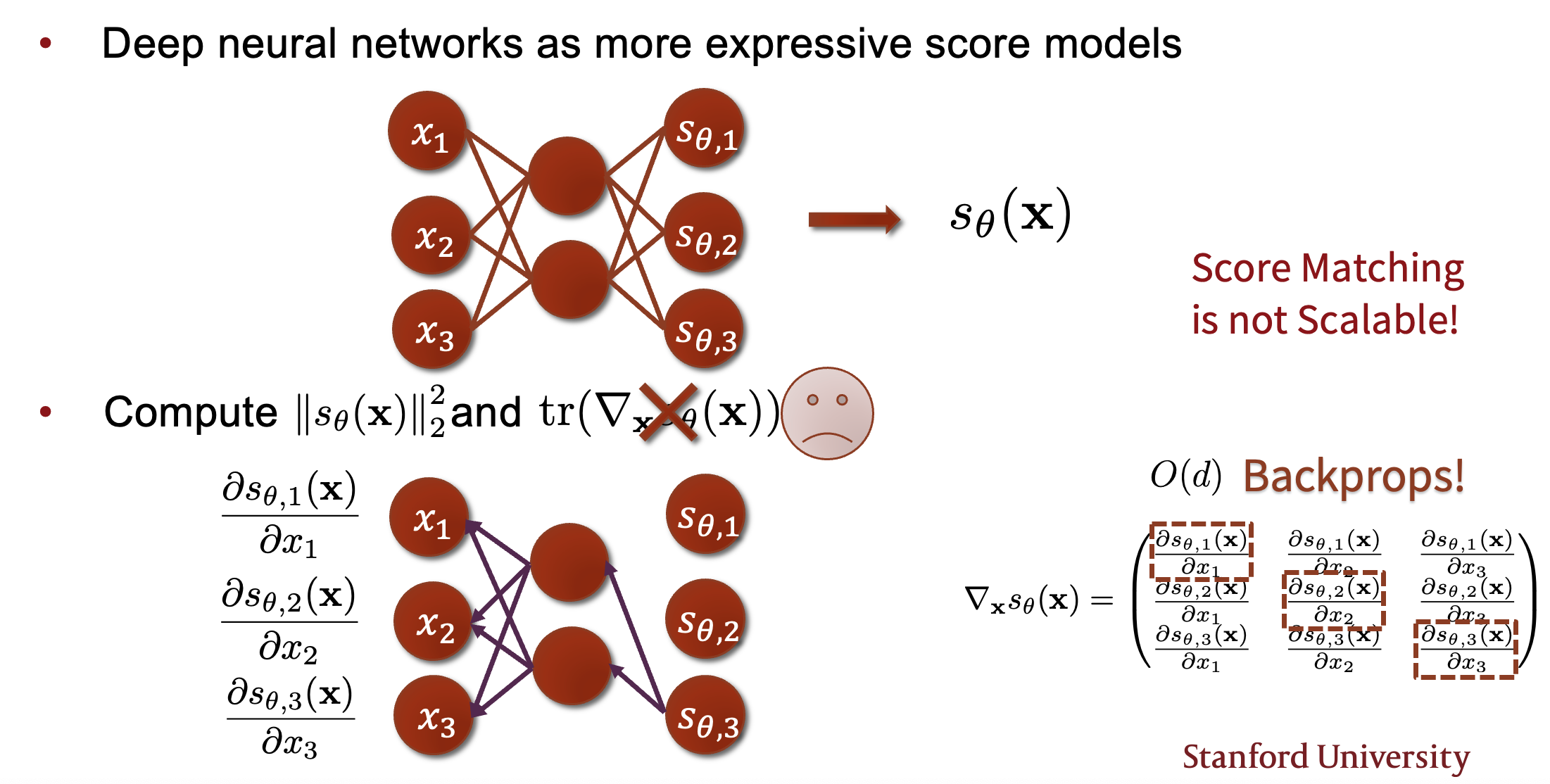
所以我们需要接下来的方法进行优化
Denoising Score Mathching¶
总体的思想是:我们不再对原先的\(p_{data}\)进行估计,而是对原始数据加入噪声后,对加入噪声后的数据\(\tilde{x}\)进行估计
设置噪声:
给定原始数据分布 \(p_{data}(x)\),加噪后的数据\(\tilde{x}\)通过以下条件分布生成:
即\(\tilde{x} = x + \delta z, z \sim \mathcal{N}(0, I)\)
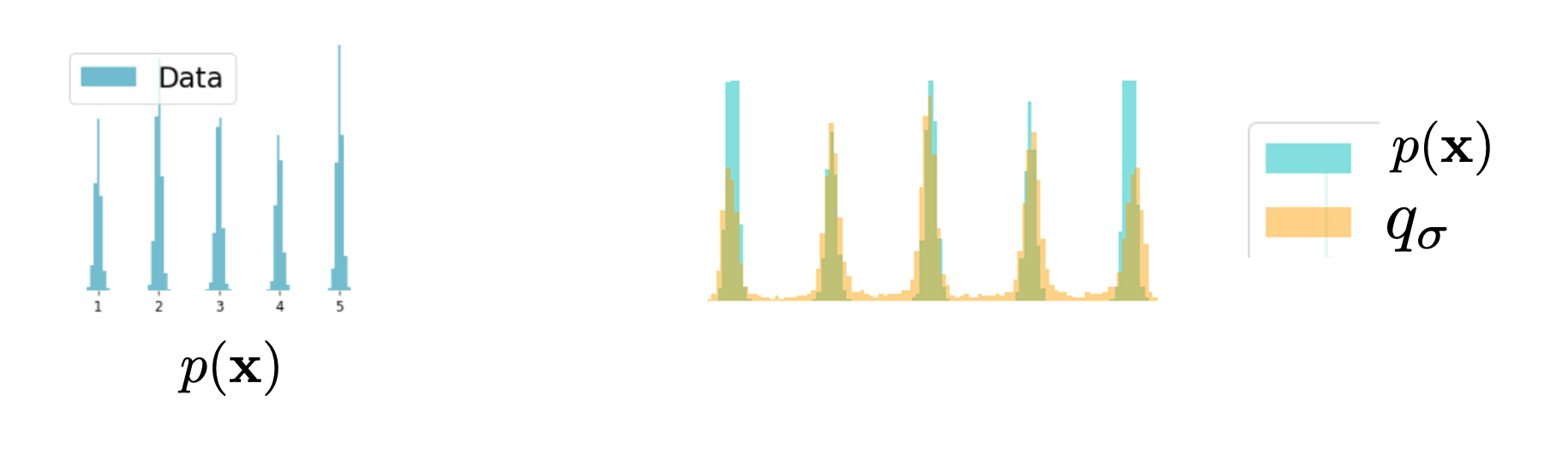
扰动后的边际分布是原始分布与噪声的卷积:
现在我们来看score matching的优化目标,进行化简得到:
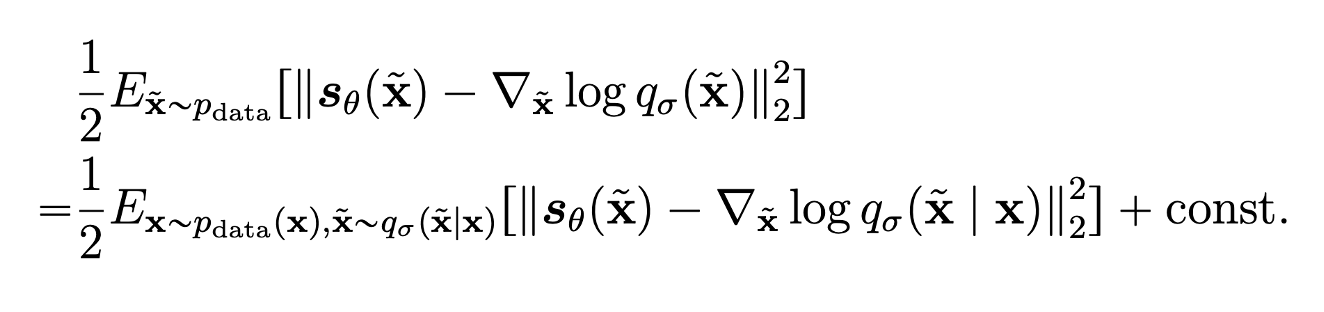
Prove
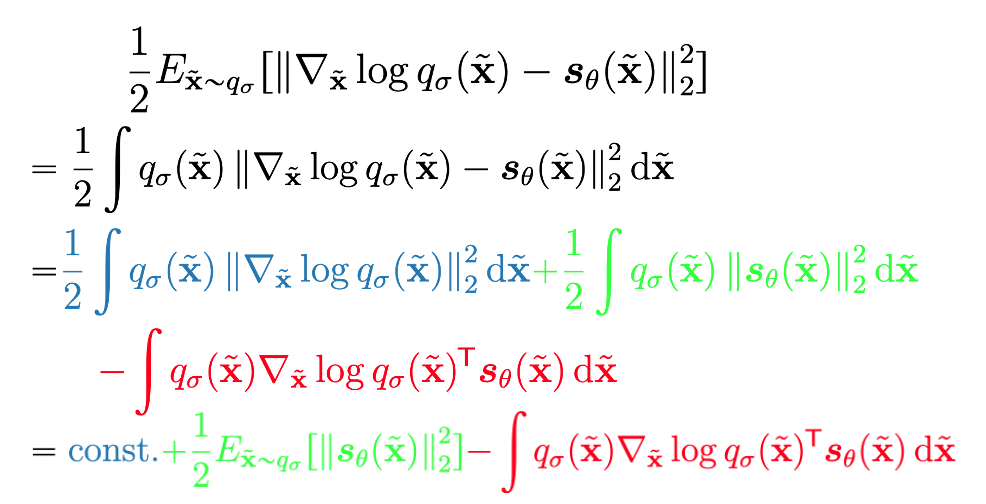
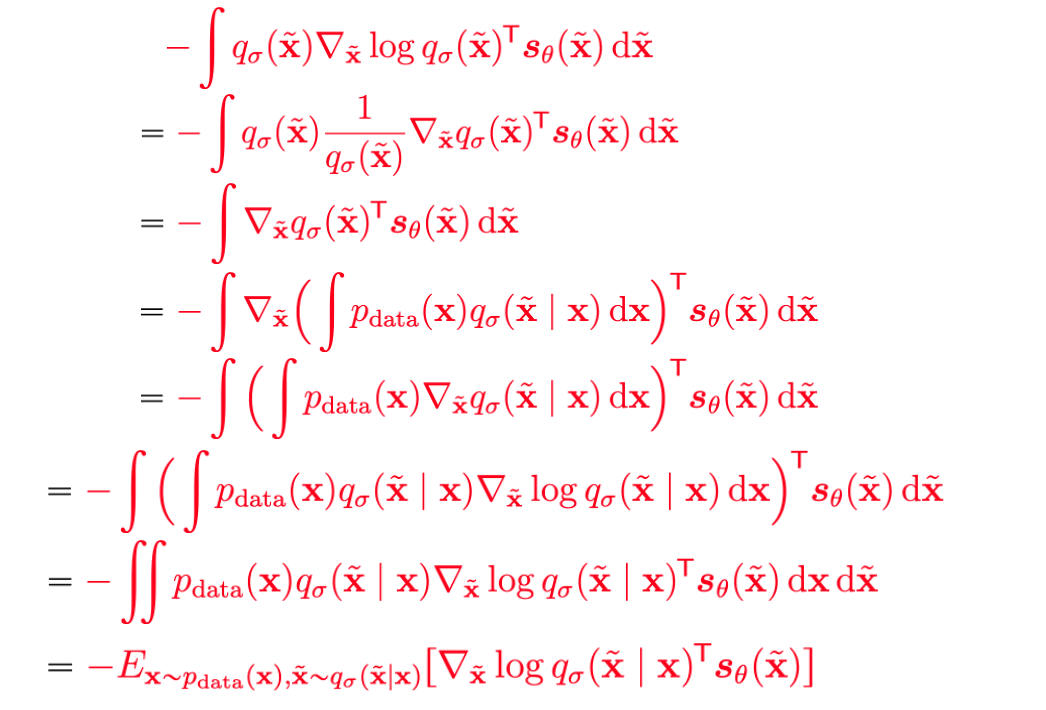
这里的化简就是将\(q_{\sigma}(\tilde{x})\)展开,然后利用他的线性性将gradient移到里面,随后重写这一项(加个log),方便将积分变为关于两个变量的期望
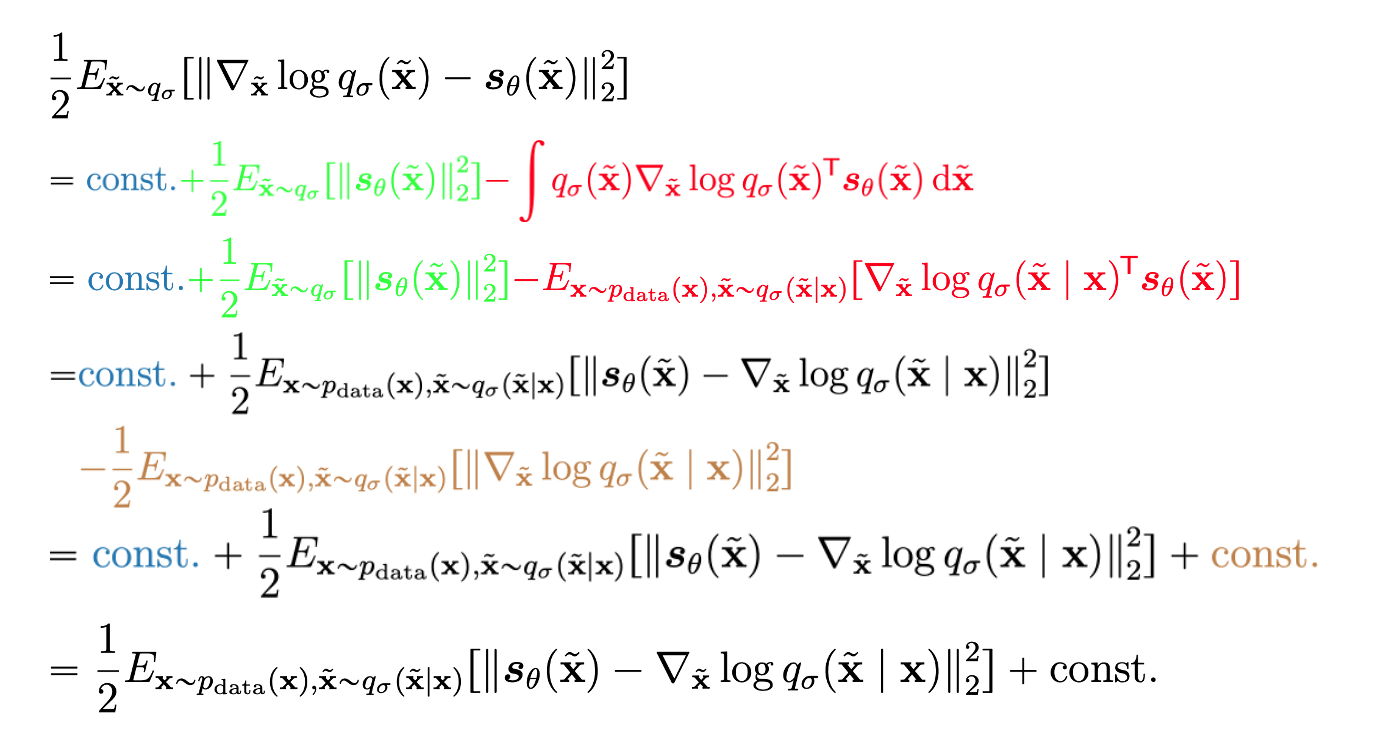
因为我们取q是Gaussian的,所以现在就有\(\nabla_{\tilde{x}} \log q_{\sigma}(\tilde{x} | x) = \frac{\tilde{x} - x}{\sigma^2}\)
- Pros: efficient for high-dimensional data
- Cons: cannot estimate the score of clean(original) data
回顾一下整个流程,我们将score matching的优化目标进行化简,得到(高斯噪声下的)denoising 形式
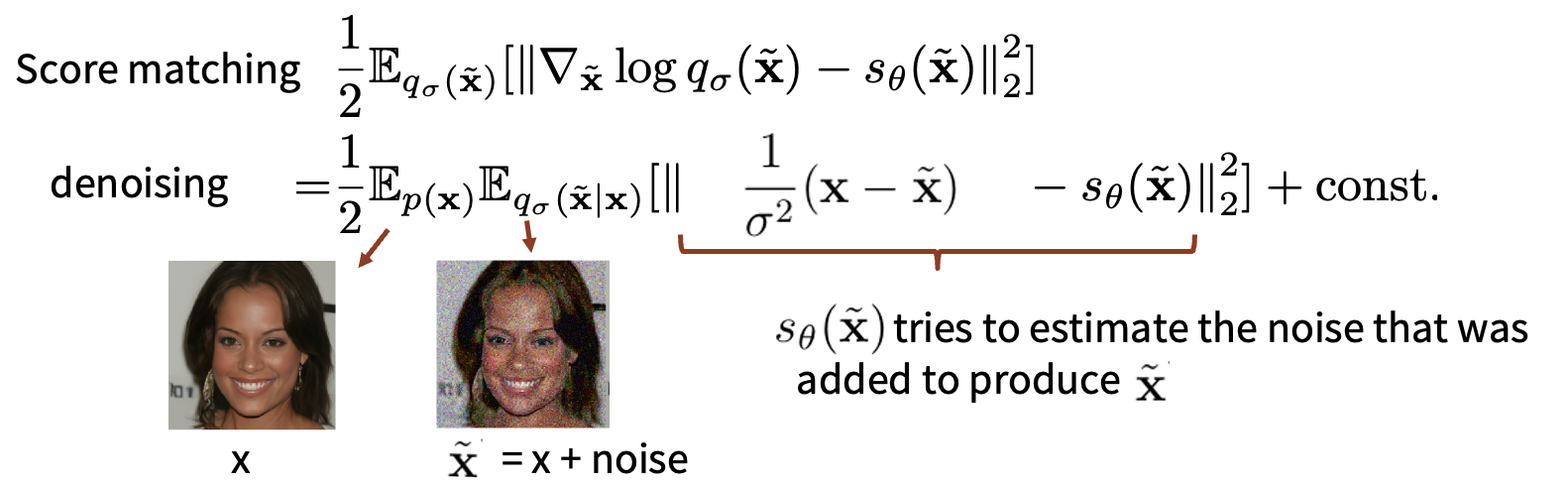
如何理解这个denoising呢?
我的理解就是在不知道\(p_{data}\)的情况下,尽量让分数间接匹配原始数据分数,可以看到公式中的\(s_\theta\)就是要在\(\delta \to 0\)时逼近\(\nabla \log q_{\sigma}(\tilde{x} | x)\)
草 我无法说服自己了
换个角度考虑,我们在思考optimal training object的时候,会发现上面我说的是成立的(也就是“尽量”)的意思,就是指怎么让未化简的公式和化简后的公式从逻辑上等价(因为化简前score是需要逼近扰动后的数据梯度,但化简后score看起来逼近的是噪声的梯度)
这里引入一个定理
Tweedie's formula
Optimal denoising strategy is to follow the gradient:
就是说,给出加噪后的图像,清晰图像的预期值符合上面的公式
Sliced Score Matching¶
对于高维数据进行score matching时,计算雅各比矩阵的trace非常困难,所以需要进行近似,在这里我们想到一种方式将高维数据降维,通过随机投影(projection)
我们假设将两个分数(真实和预测)投影到随机向量\(v\)上后如果他们相等,那么就认为两个分数相等
这里的\(\mathbf{v^T}\)与\(\mathbf{s_\theta}\)的乘积(点乘)是一个标量,所以最终我们得到的结果是一维的,通常我们随机选取\(v\),可以从\(p_v\)(Gaussian、Rademacher中采样)中采样
现在来解释一下为什么计算这里的\(\mathbf{v^T \nabla_{x} s_\theta \mathbf{v}}\)是scalable的
Tip
- 第一步前向传播计算\(\mathbf{s_\theta}\)
- 第二步通过投影将\(\mathbf{s_\theta}\)降维到一维
- 通过一次反向传播来计算这个标量对于所有输入的梯度
- 再取一个点积将这个梯度降到一维
- Pros:
- 同样是more scalable
- 是对clean data的score估计
- Cons:
- slower than denoising sm
Inference¶
我们知道可以按照分数的梯度方向进行采样,但是那样数据分布会完全收敛到一个单点,所以需要引入噪声
采用Langevin dynamics MCMC进行推理:
但是这种naive的方式效果非常差,原因有以下几点:
-
Manifold hypothesis: 数据分布在低维流形上,当数据逐渐收敛时,我们的分数会失去定义
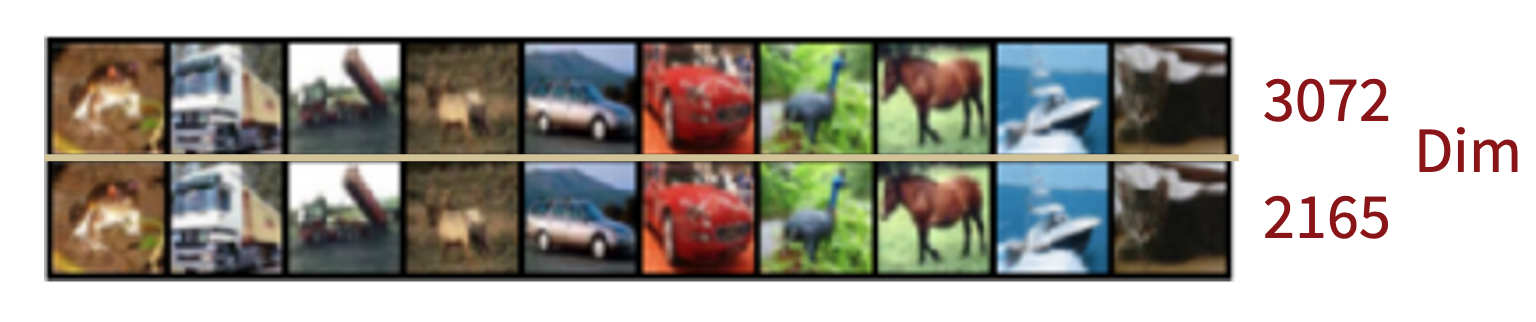
可以看到即使PCA降维后,样本仍没有太多变化
-
数据密度在不同区域不同,会在低数据密度区域迷失方向
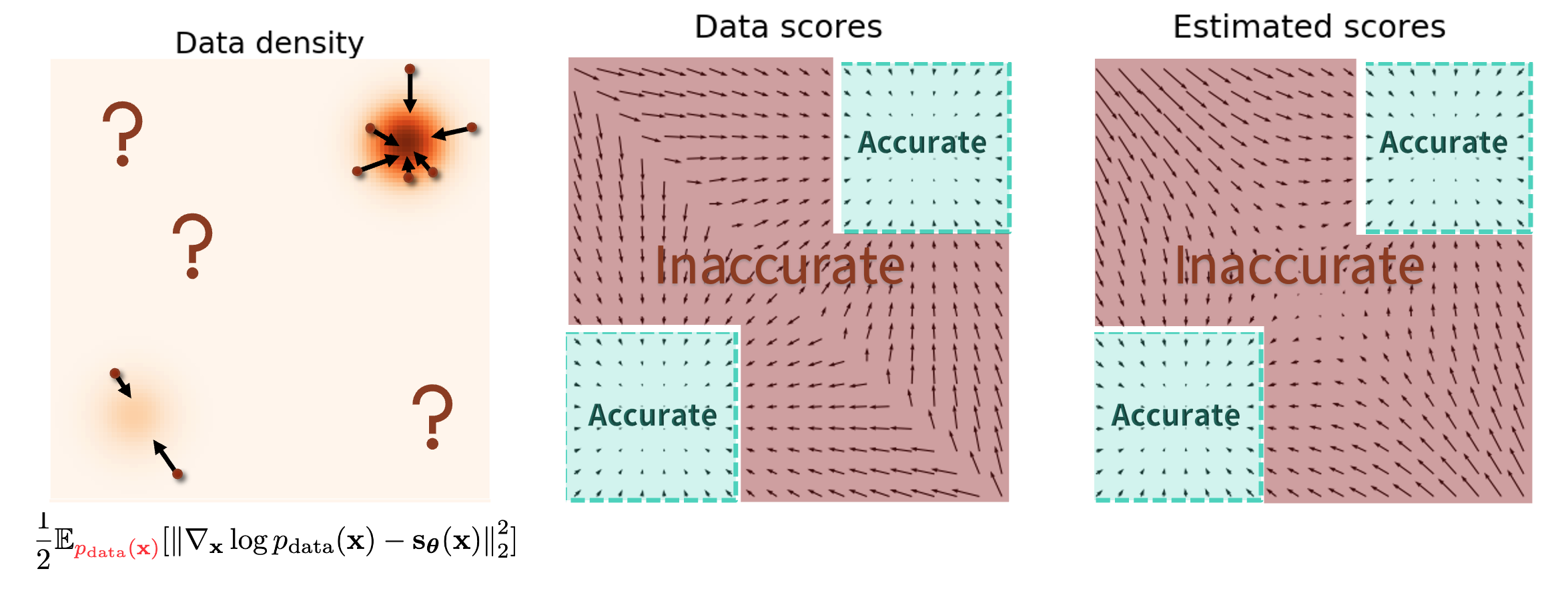
这一点比较好理解,我的理解就是在低密度数据区域,数据的分布很稀疏,梯度方向不稳定,很难收敛到高数据密度区域,造成采样失败
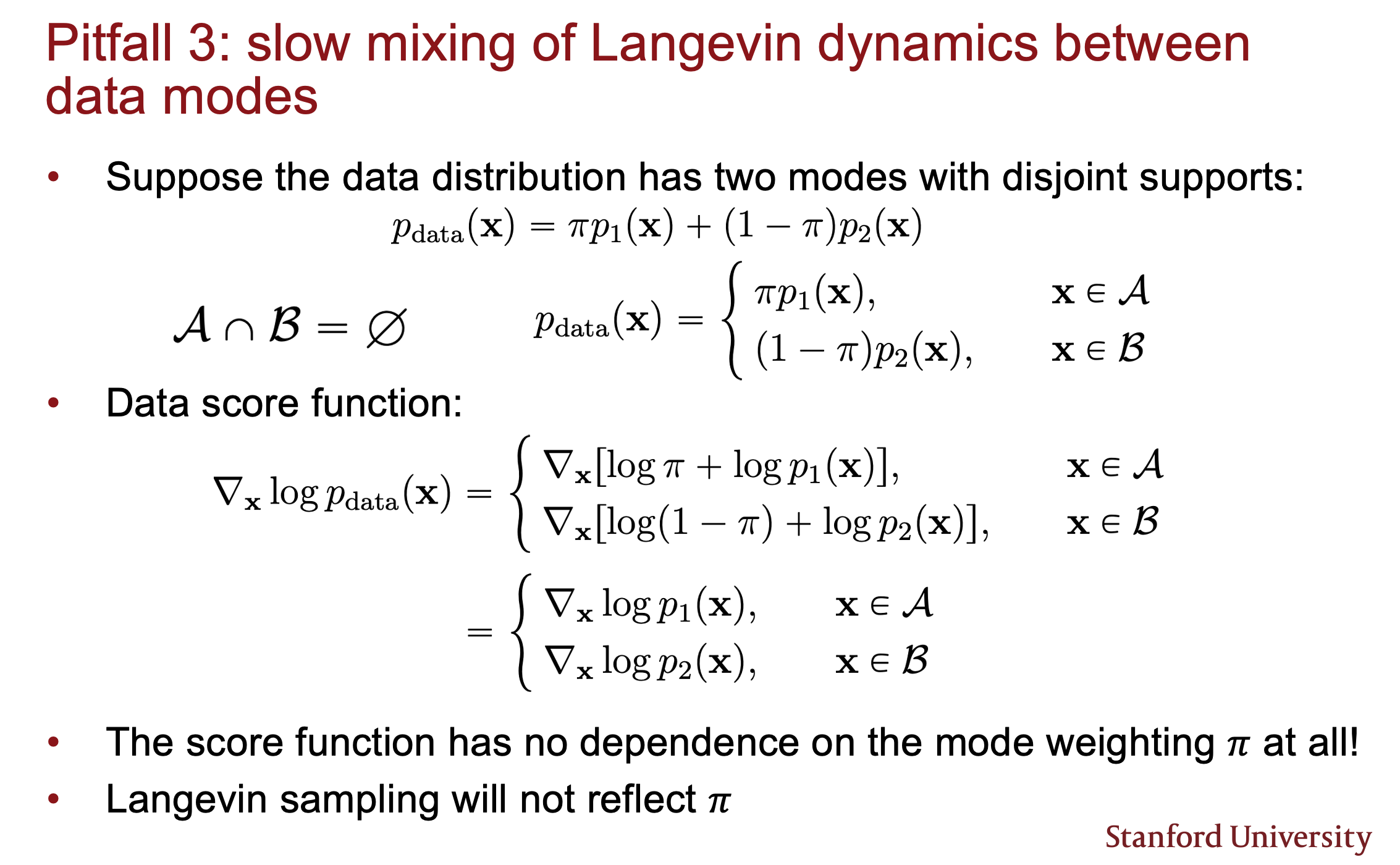
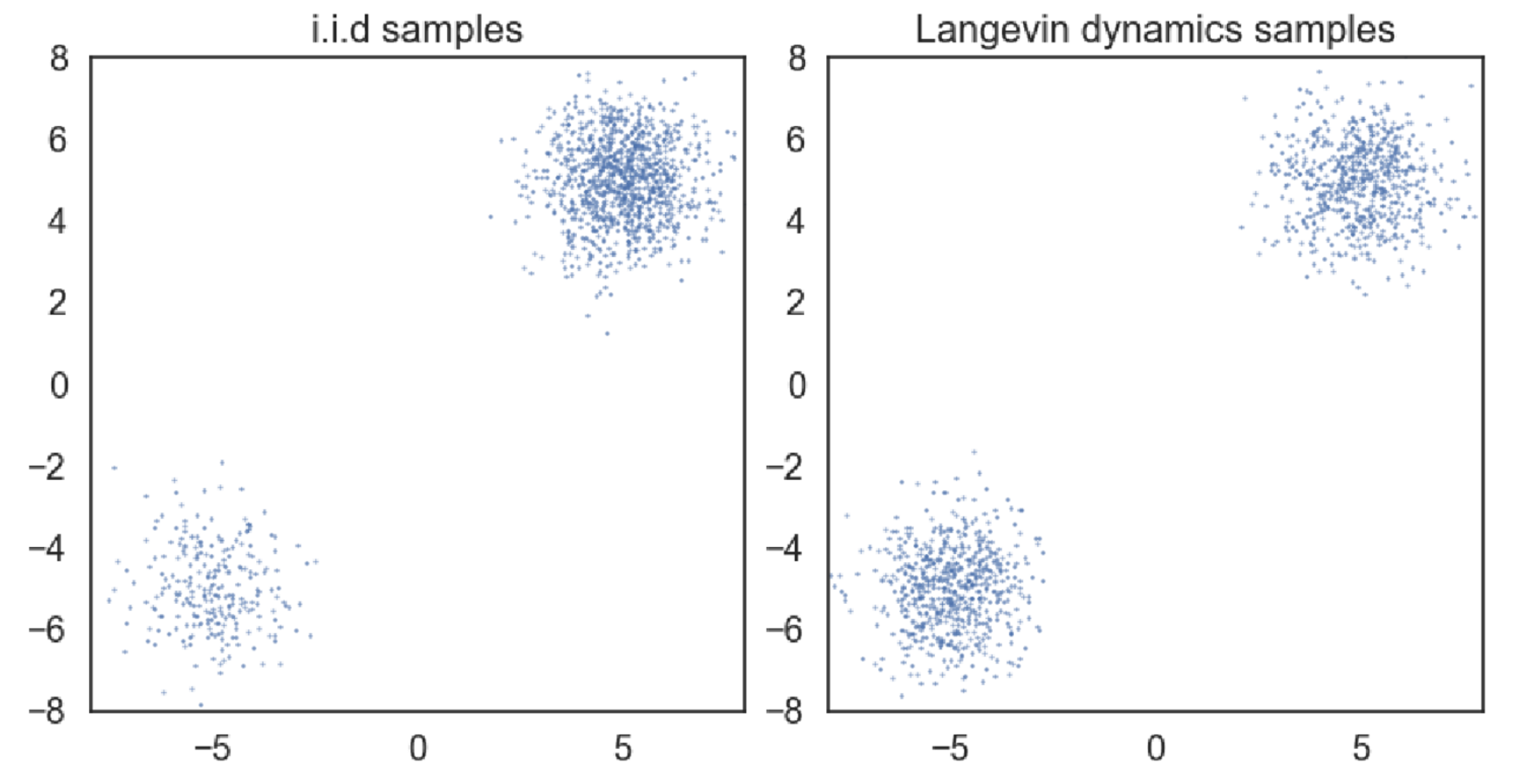
- 混合密度分布的比例系数会消失
Gaussian Perturbation¶
通过Gaussian Perturbation,我们可以有效的解决上述问题:
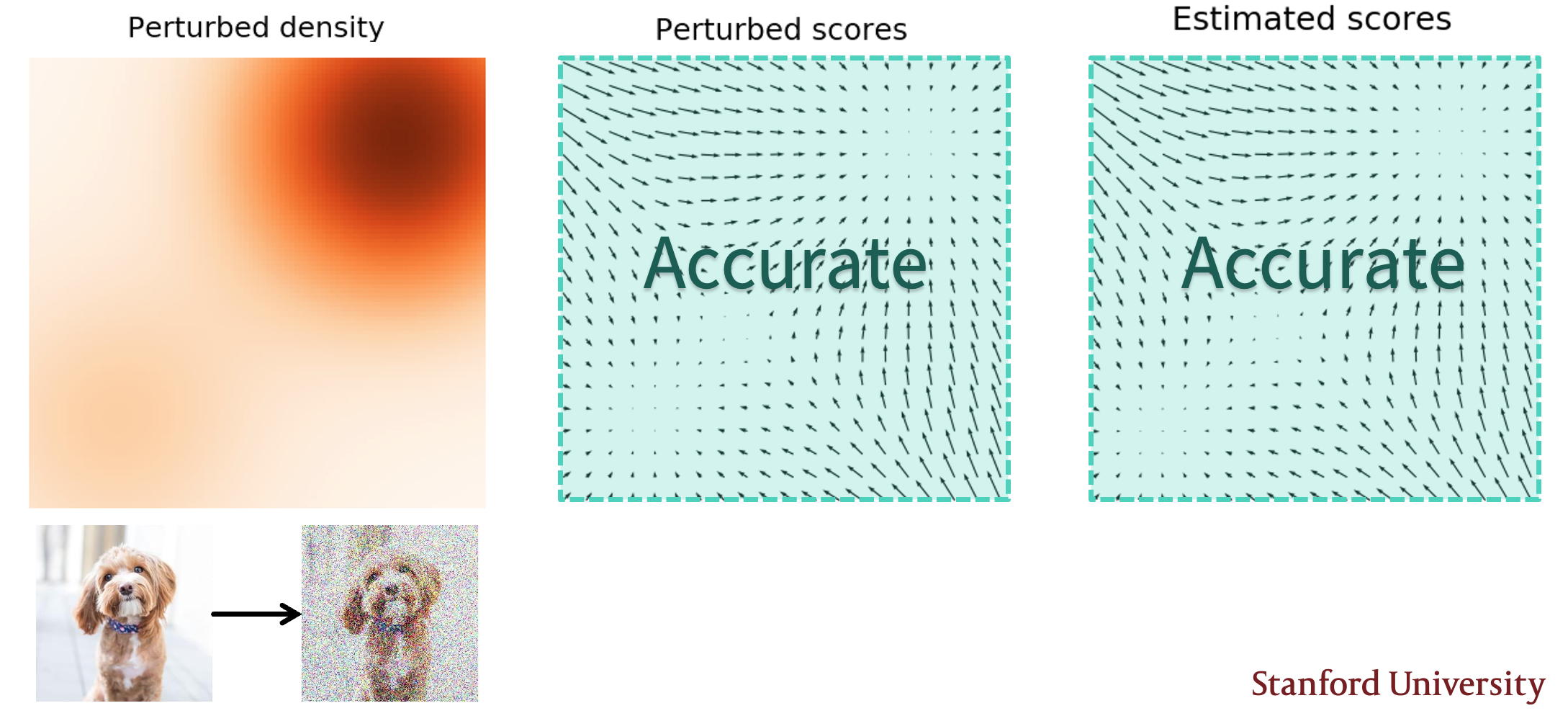
可以看到在加入Gaussian Perturbation后,低密度区域的数据密度得到提升,能够更好的计算score,进而提升了其在低密度区域的准确性。
Difference between denoising and Gaussian Perturbation
我在听stefano讲课的时候感觉同学们也没有完全get到他这里提到的perturbation和denoising SM的区别,我的理解是:
在这里的perturb和DSM其实是等价的,本质都是通过向数据加入噪声的一个处理,但是在DSM中,我们强调的是通过引入噪声来化简计算,而perturbation强调的是通过引入噪声来提升数据密度,进而提升score的准确性,这里提出的perturb是可以使用在任何score matching的算法中的,同时也为他在下文中引出的multi-noise perturbation做铺垫
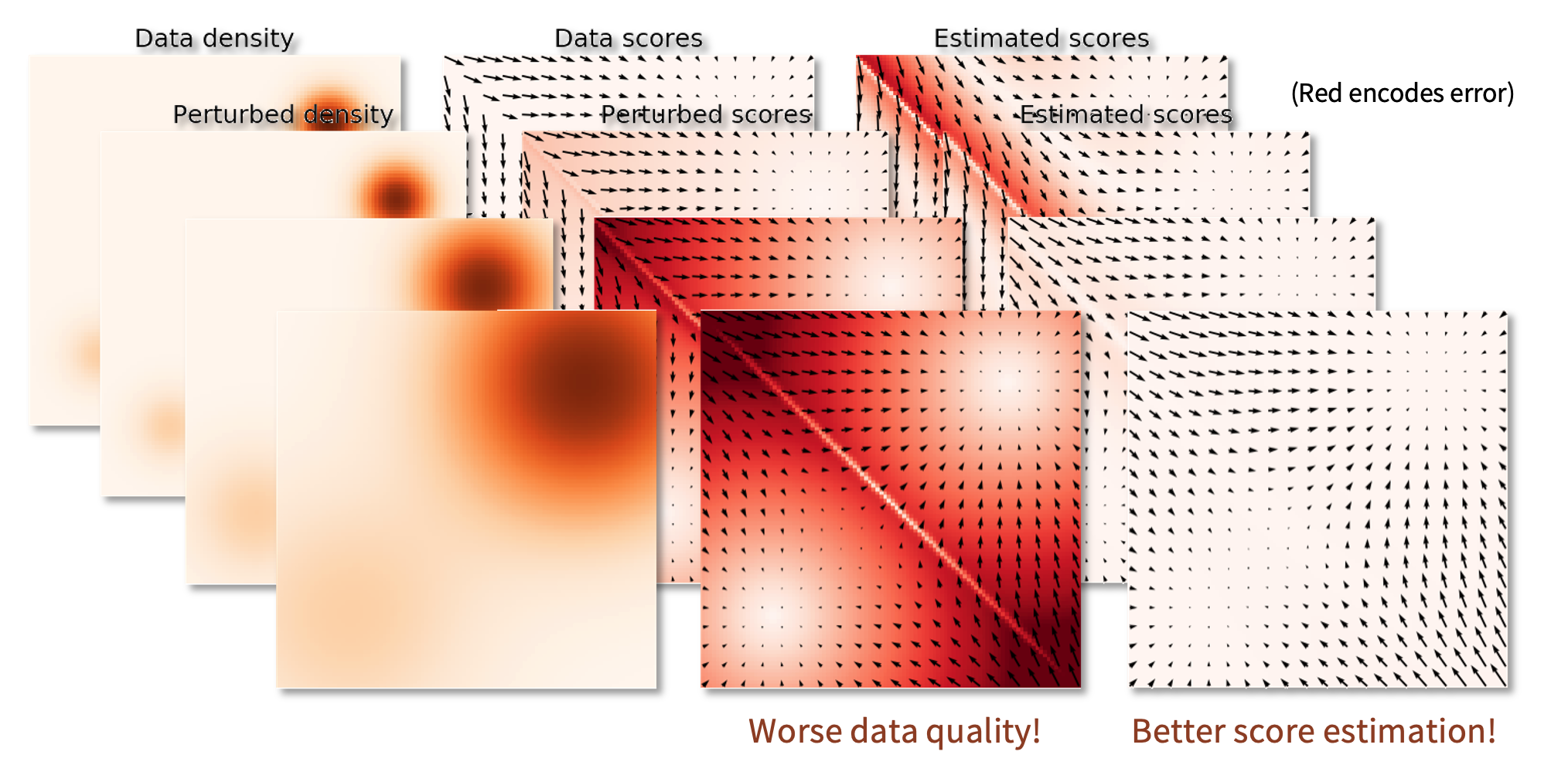
所以现在的问题来到了怎么添加noise,选择\(\sigma\),因为:
- 如果\(\sigma\)太小,那么数据分布的改变不会太大,那么score的估计也不会改变太多
- 如果\(\sigma\)太大,那么数据分布的改变会太大,我们得到estimation与true data的差异会很大
trade off:
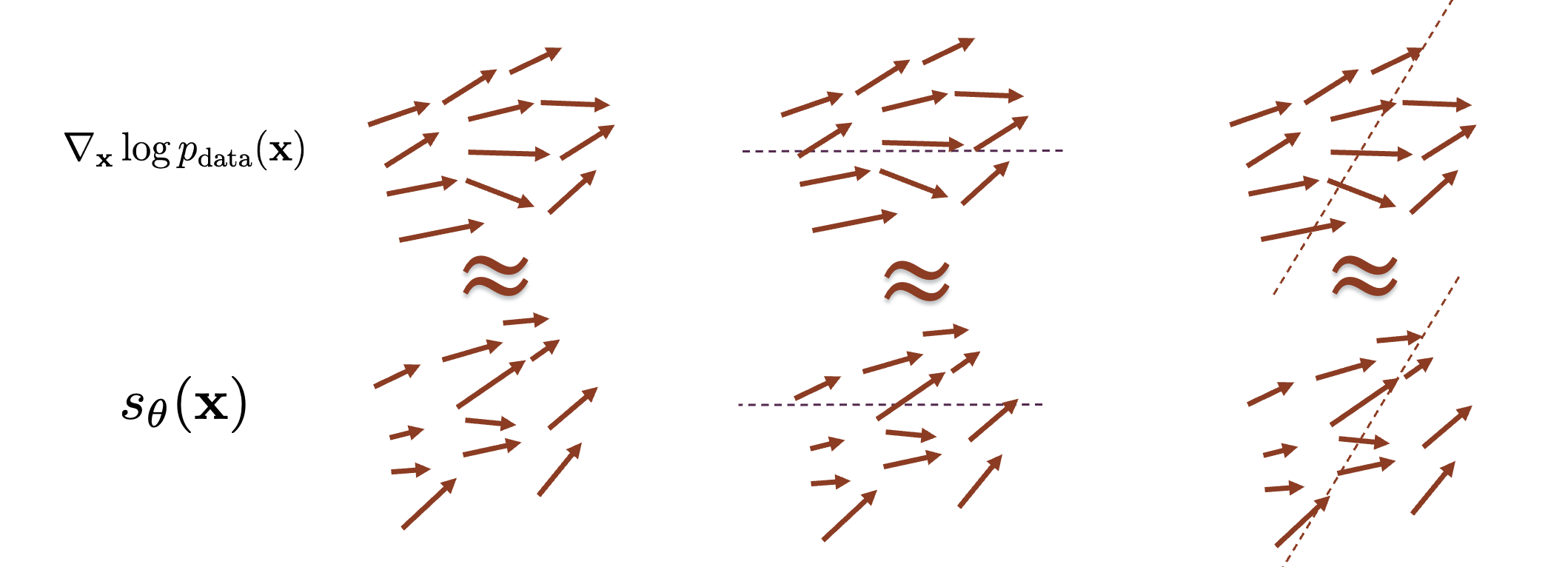
Multi-noise Perturbation¶
Understanding
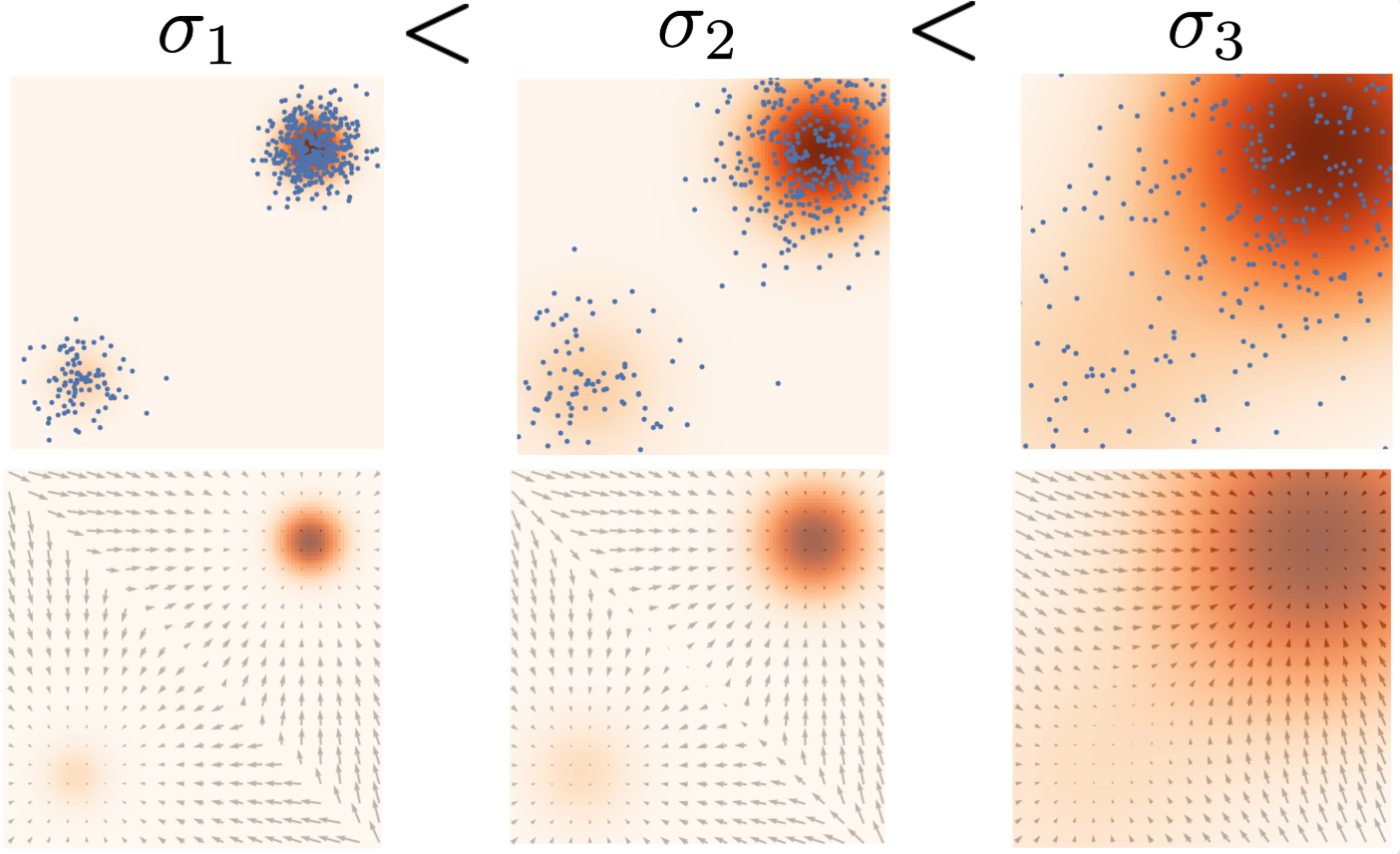
我们引入一种新的方法,尝试使用多个噪声进行加噪然后学习分数,原因用下面这张图来说明:
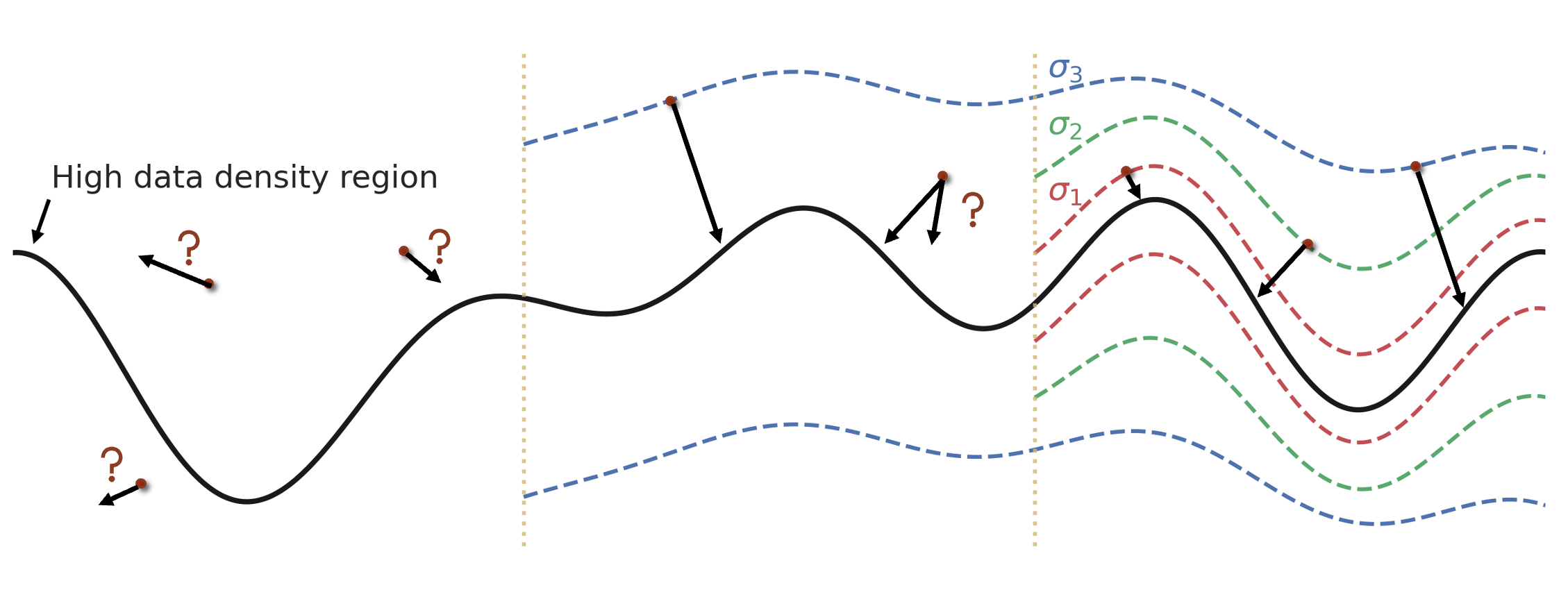
假设我们的数据落在这个黑色粗线附近,但是我们的采样可能会在这个平面中远离粗线的地方,这时较低的数据密度导致我们不能很好的估计梯度方向,使用不同的\(\sigma\)进行加噪,让我们的采样能够读到更好的梯度方向。
这就是score based model和diffusion model背后的思想,我们不仅要学习数据分布,不仅要学习数据分布加上单一噪声的分布,我们要学习数据被不同噪声量扰动后的分数
具体的实现如下:
-
Training:
- simultaneously使用正交的高斯噪声\(\sigma_i\), \(\mathcal{N}(0, \sigma_i^2 I), i = 1, 2, \cdots, L\)进行加噪(加噪的方式是和DSM一样的)
- 每次加噪后,计算score\(\nabla_{x} \log p_{\sigma_i}(x)\),这一步是通过训练Noise Conditional Score Based Model \(\mathbf{s}_\theta(\mathbf{x}, i)\)来实现的
Noise Conditional Score Based Model
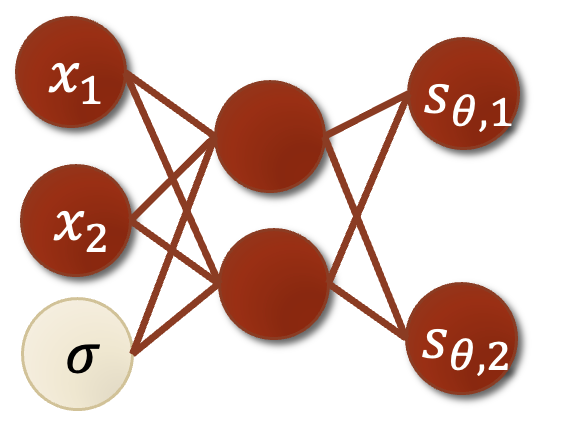
如果我们直接计算L个神经网络,将会十分expensive,所以我们这里使用一个神经网络,通过调整不同的\(\sigma_i\)来计算不同的score
这样就可以得到L个score,但是目标需要经过加权:
这里的加权函数\(\lambda(i)\)通常等于\(\sigma_i^2\)
-
Sampling:
- 使用Annealed Langevin dynamics for \(i = L, L-1, \cdots, 1\)进行采样
这个过程中使用退火朗之万,并且将每次的sample作为下一次的初始值
- Noise Choice
最后还涉及到一些噪声的选择问题,我们知道噪声是一个递进的/递减的,所以这里涉及到这个噪声的变化过程:
key point是:
- 相邻的噪声之间需要overlap to facilitate transitioning across noise scales
- 采用geometry progression with sufficient length:
Score-based models with SDEs¶
通过将noide level提升到 infinity, we obtain not only higher quality samples, but also, among others, exact log-likelihood computation, and controllable generation for inverse problem solving.
我们将上一步中的noise在时间维度取极限,得到一个连续的noise level,也就是一个随机微分方程(SDE)

这样得到的就是一个完全的噪声:
现在我们用SDE来表示这个过程:
Notation
- \(f(x, t)\): drift coefficient,漂移系数决定数据的确定性演化方向
- \(g(t)\): diffusion coefficient,扩散系数决定数据的随机性演化方向,控制噪声的强度
- \(\mathbf{dw}\): Wiener process,标准布朗运动(维纳过程),表示无穷小的高斯白噪声
Choice of SDEs
噪声方差随时间增大,最终覆盖整个空间,快速爆炸噪声
总体方差保持稳定,常用于diffusion model
这个随机微分方程的解是一个连续的随机变量集合\({x(t)}_{t \in [0, T]}\),表示在时间\([0, T]\)内,数据\(x\)的演化过程(trace stochastic trajectory as t increases),这时我们的数据分布\(p_t(x)\)就是表示在时间\(t\)时,数据\(x(t)\)的marginal distribution density function,所以在\(t \rightarrow T\)时,\(p_t(x)\)就是噪声扰动后的数据分布\(\pi(x)\)
现在我们来考虑怎么进行sample,首先回顾我们的finite version,我们通过Annealed Langevin dynamics进行采样,即sequentially 在不同的噪声阶段进行朗之万动力学采样,现在我们将加噪过程变成了一个随机微分方程,那么自然的我们想求解这个SDE的reverse:
理论上每个SDE都有一个reverse SDE:
不难发现,这里的\(\nabla_x log p_t(x)\)就是我们的score!
现在来看看训练思路:
根据上面的式子,不难观察出我们只需要知道:
- terminal distribution \(p_T(x)\):就是我们的加噪数据分布,tractable
- score function \(\nabla_x \log p_t(x)\):我们需要训练一个Time-Dependent Score-Based Model\(s_\theta(x, t)\),such that \(\nabla_x \log p_t(x) \approx s_\theta(x, t)\),这和我们对finite的训练是相似的: \(\nabla_x \log p_{\sigma_i}(x) \approx s_\theta(x, i)\)
这时我们的training obj就是:
这里,\(\mathcal{U}\)表示0,T之间的均匀分布,\(\lambda\)还是那个正项权重函数,通常选择\(\lambda(t) \propto \frac{1}{\mathbb{E}[\|\nabla_{\mathbf{x}(t)} \log p(\mathbf{x}(t) \mid \mathbf{x}(0))\|^2_2]}\)来对不同时间的score进行平衡。
这时对score function进行训练,用sliced或者denoising sm优化后,将结果插入SDE:
从\(x(T) \sim \pi\)开始,我们开始进行reverse SDE解,得到\(x(0)\),当score well-trained时,这时的\(x(0)\)就是一个approximate sample from distribution \(p_0\)
likelihood weighting function
在这里我们可以引入likelihood,通过选择一个weighting function \(\lambda(t) = g^2(t)\)使得
由于这个式子中带有的KL散度,并且最小化KL散度和最大化模型训练中的似然是等价的,我们给这个加权函数才起名为似然加权函数,并且Yang Song的博客中提到这个追求似然的训练结果会比当时最好的AR模型更好
Predictor-Corrector¶
首先看怎么解SDE:
- Euler-Maruyama method: 采用离散化SDE,用finite step来逐渐逼近SDE的解,这个过程很像朗之万动力学,都是在逐渐逼近目标分布的同时加入扰动
-
Predictor:
使用任何一种numerical method that predicts \(x(t + \Delta t) \sim p_{t+\Delta t}(x)\) from existing sample \(x(t)\sim p_t(x)\)
-
Corrector:
任何独立依赖score function的MCMC procedure,例如朗之万或者是汉密尔顿MC
使用中就是先用predictor预测,再用corrector纠正
Controllable generation¶
关于加入限定条件的生成任务,也就是通过贝叶斯公式对概率进行条件约束,在这里score function是很合适做这个任务的,因为对贝叶斯公式:
假设我们知道正向生成结果\(p(y|x)\)
通过取梯度可以极大的化简这个式子:
因为后两项分别是已知的和score function,所以先验概率很好得到了
以上内容在25 Summer 期末周前完成,coding部分如果有时间的话我也想好好看看的,但是临近期末,先不看了,后面有时间的话可以补上,但我还是倾向于将flow matching方向的理解先完成
留言