Amortized Analysis¶
均摊法分析是对一系列操作的平均性能进行分析,而不是对单个操作的性能进行分析
bound介于worst和average之间且均摊界与概率无关
通常有三种方法:Aggregate Accounting Potential
Aggregate Method¶
对一系列的操作进行最坏时间情况分析得到\(T(n)\),此时: $$ T(n) \leq \sum_{i=1}^{n} t_i=O(n) $$ 这时\(T(n)\)逼近于\(O(n)\),即均摊时间复杂度为\(O(1)\) 但是这个方法的难点在于需要确定这个\(\sum_{i=1}^{n} t_i\),也就是总的时间开销
在讲解其余的两个方法之前,yy哥说了一个很有趣的故事:
yy在学校门口开了一个小卖部买汽水,每次卖出一瓶成本为1的汽水,学生至少要交一块钱,但是也可以多交钱存到下次使用,汽水的成本就是actual cost,而学生交的钱就是amortized cost,多出来的钱我们称作credit
Accounting Method¶
在这个方法中,我们自己设置均摊价值,但需要保证均摊价值不会小于实际价值,即:
(也就是不会赊账)
这时候就会得到一个实际价值的上界
这个方法的过程就是:
- 首先分析实际价值
- 然后设置均摊价值
- 分析credit的值,确保其大于等于0
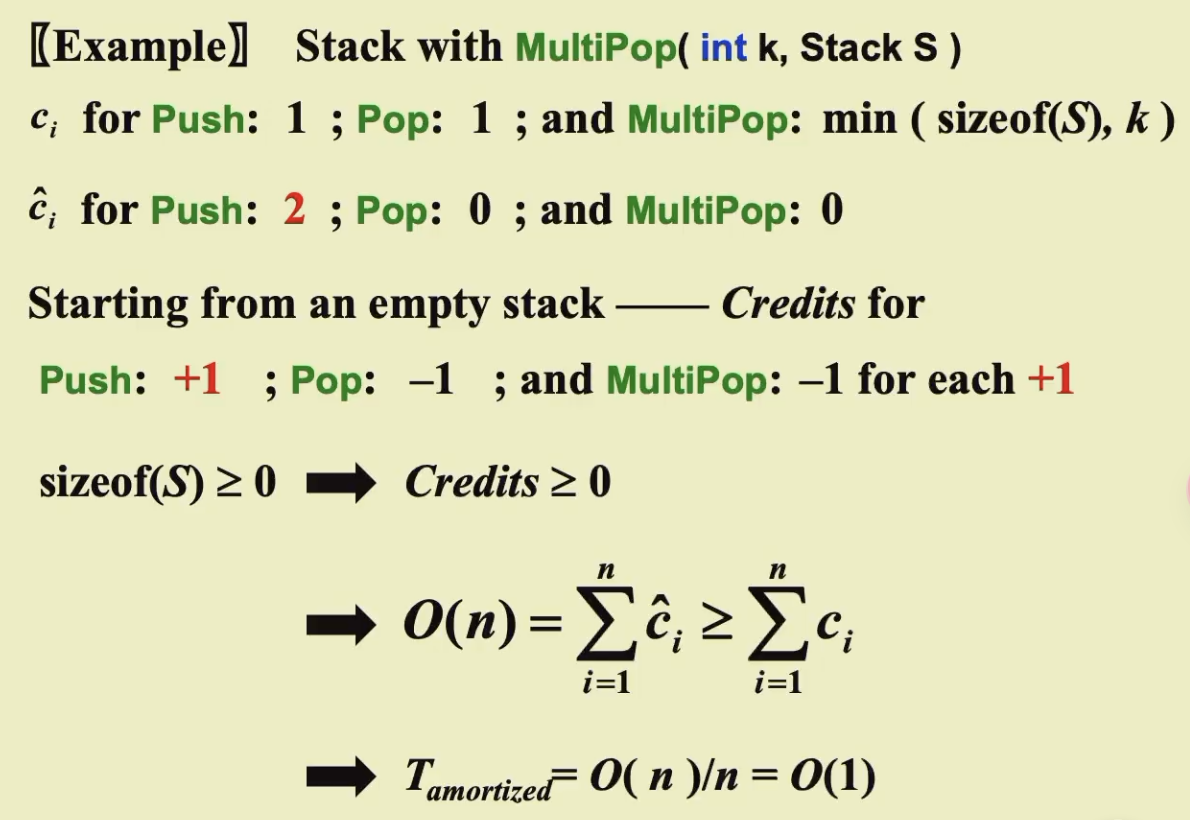
MultiPop
Potential Method¶
直观的、一次性定义所有操作的均摊代价,对于某些大量操作需要定义均摊价值的情况,这种方法更加适用
解释:
\(Credit_i\):第\(i\)次操作的credit,这时我们引入一个状态得分函数\(\Phi(D)\),这个函数的值是一个状态的代价\(D_i\)是第\(i\)次操作后的状态
但是对于每一次操作,\(Credit_i\)的数值不仅由当前的状态决定,还受到之前状态的影响,因此我们用\(\Phi(D_i)-\Phi(D_{i-1})\)来表示
此时,我们可以得到:
恰好在这个求和的过程中,只留下了\(\Phi(D_0)\)和\(\Phi(D_n)\),这两个值是常数,从而我们得到了\(\sum_{i=1}^{n} \hat c_i\)的值
实际操作中,我们:
设计势能函数
- 选择一个合适的状态得分(势能)函数\(\Phi(D)\)
- 势能函数的定义要求:\(\Phi(D_0)=0\)
- 反应函数的潜在复杂度
- 检查Credit合法性
- 计算\(\sum_{i=1}^{n} \hat c_i\)
- 最好的势能函数应该确保n次操作的credit值尽可能小
对Splay树进行均摊分析
若选深度作为势能函数,无法计算所有节点的深度变化,因此不能选择
若选择所选转节点的子节点个数,可以行得通,但是X、G的变化太大,所得到的界太松
最终选择的技巧是:
对节点数取对数 得到树的秩
即:\(\Phi(D)=Rank=\sum\log S(n)\)
对势能函数分析时,如果进行完全分析,需要对每个节点的credit进行计算,但是这样计算太复杂,因此我们进行放缩,只对所寻找的目标节点的势能进行分析,这样可以简化问题
需要用到下面的引理:
Lemma
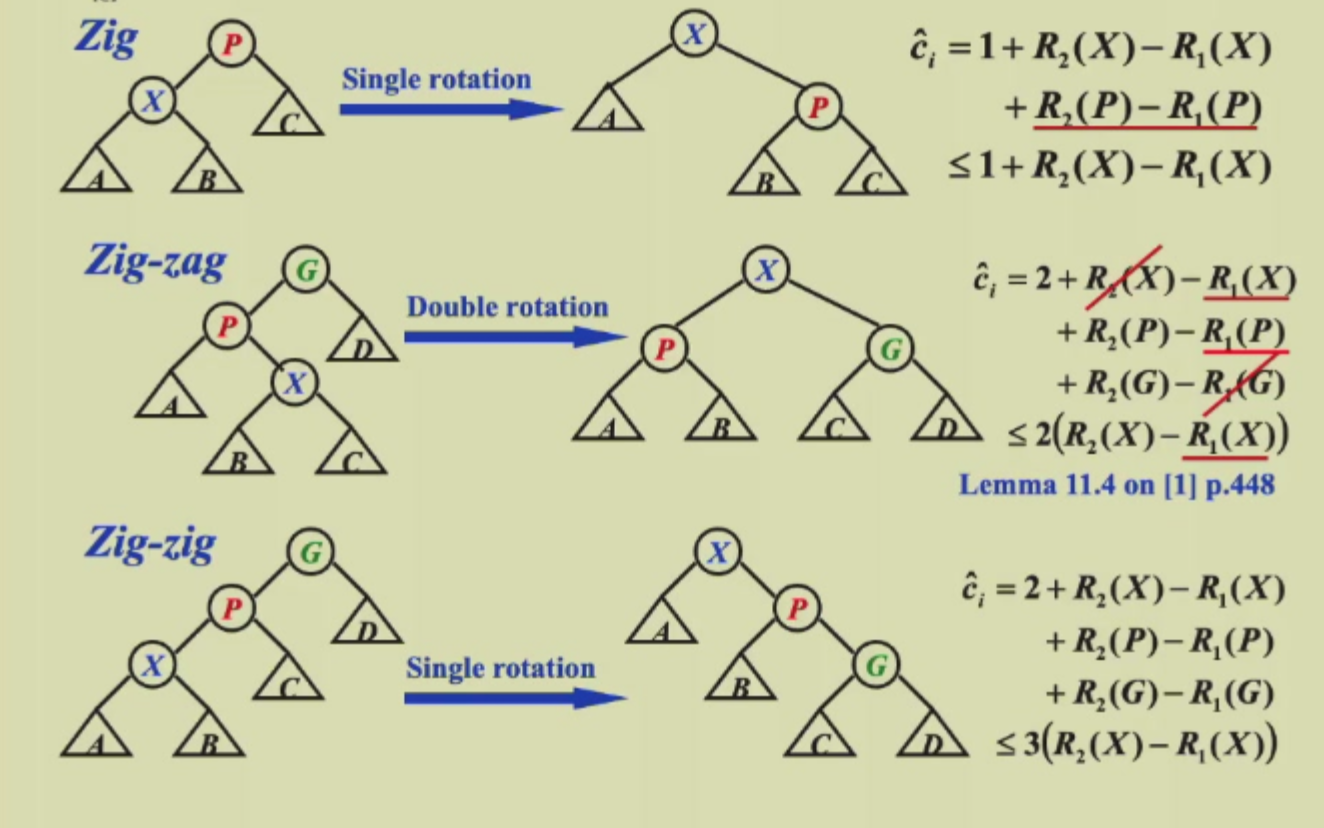
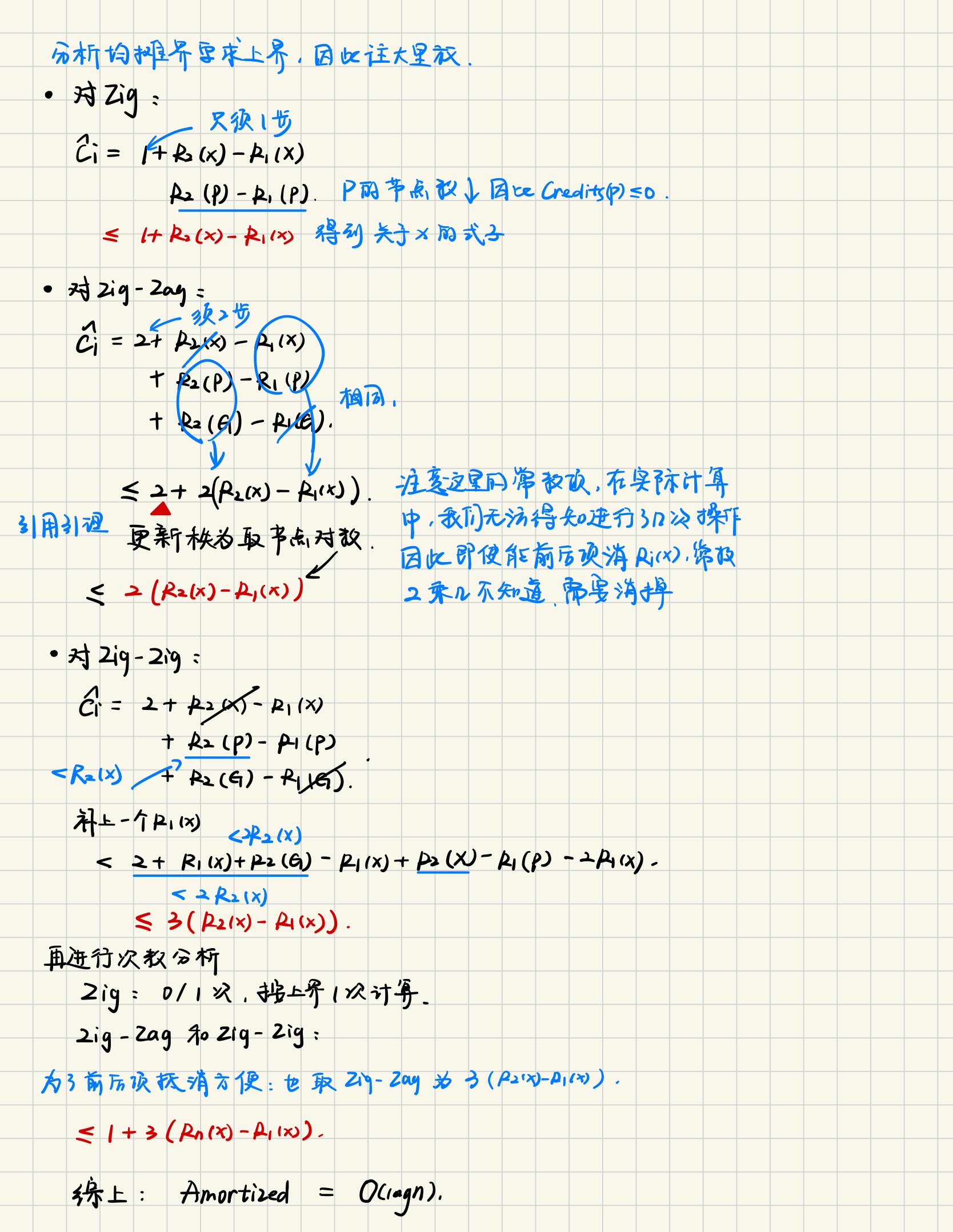
我手写了一下这三个放缩的过程:
留言