Processor
Single-Cycle Processor¶
Intro¶
指令执行的步骤概述:
- 最开始的两步是相同的:
-
Fetch 从指令内存中拿出指令
-
Decode and Read Operands 解码并读寄存器
- 在进行指令解码完成前就可以读取数据,因为数据位置是固定的,并且读数据不会破坏数据,所以无论是否使用,都会先拿出对应的register operands。
-
Executive Control
所有的指令都会经过ALU,根据指令的类型进行不同的ALU操作:
- 内存引用指令:Memory Reference
- 算术逻辑指令:Arithmetic and Logic
- 条件分支指令:判断两数是否相等
-
Memory Access
通过load和store指令访问数据
- 内存引用指令:访问内存进行读写
- 算术逻辑指令/加载指令:将内存或者寄存器中的数据写入寄存器
- 条件分支指令:根据比较结果更新PC:PC+4 或到指定目标地址
-
Write results
-
Update PC
simple processor
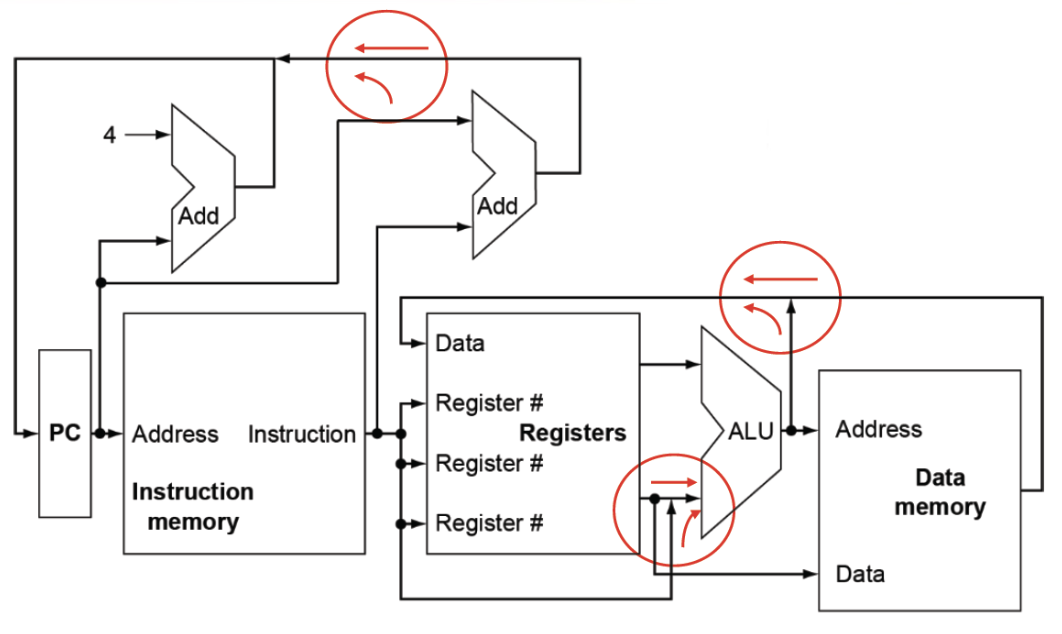
三个红色圆圈是多路选择器,因为需要对不同的数据来源进行选择,比如ALU中的输入既可以是R型指令中的两个源寄存器,也可以是I型指令中的一个源寄存器和一个立即数。
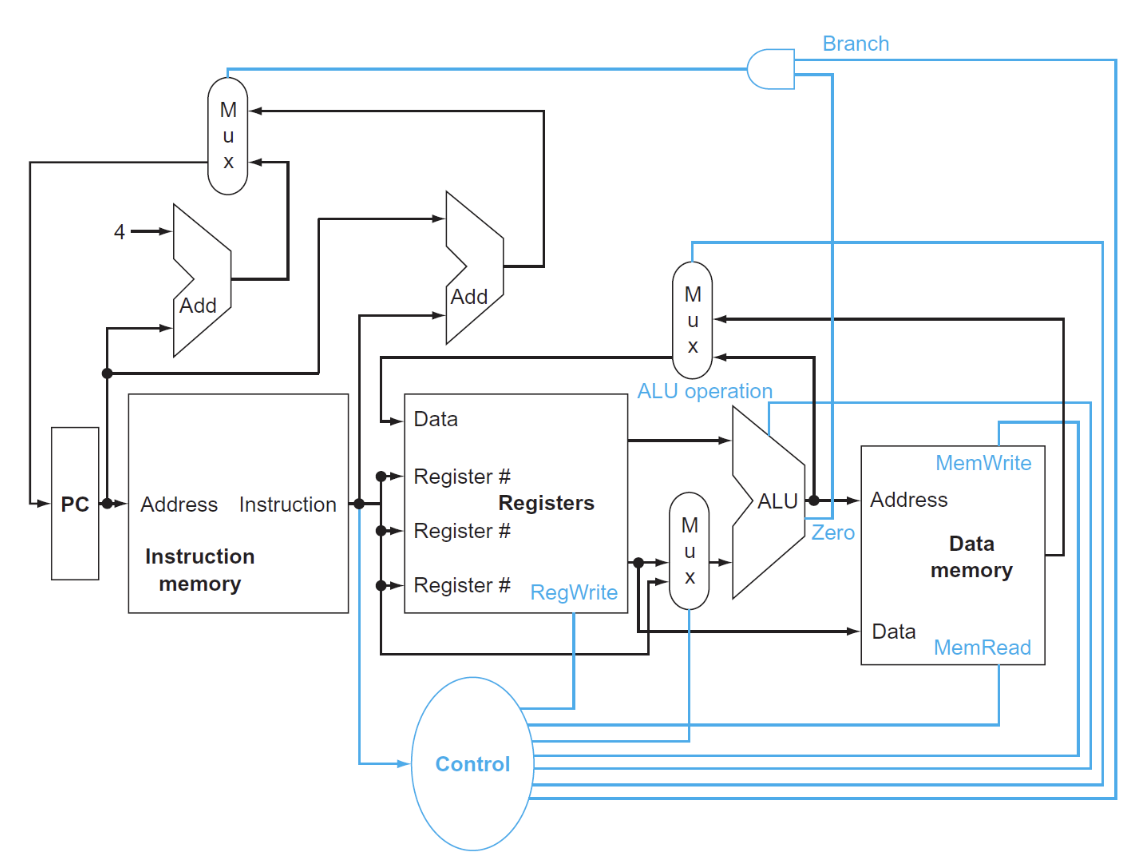
with control
Clock Methodology¶
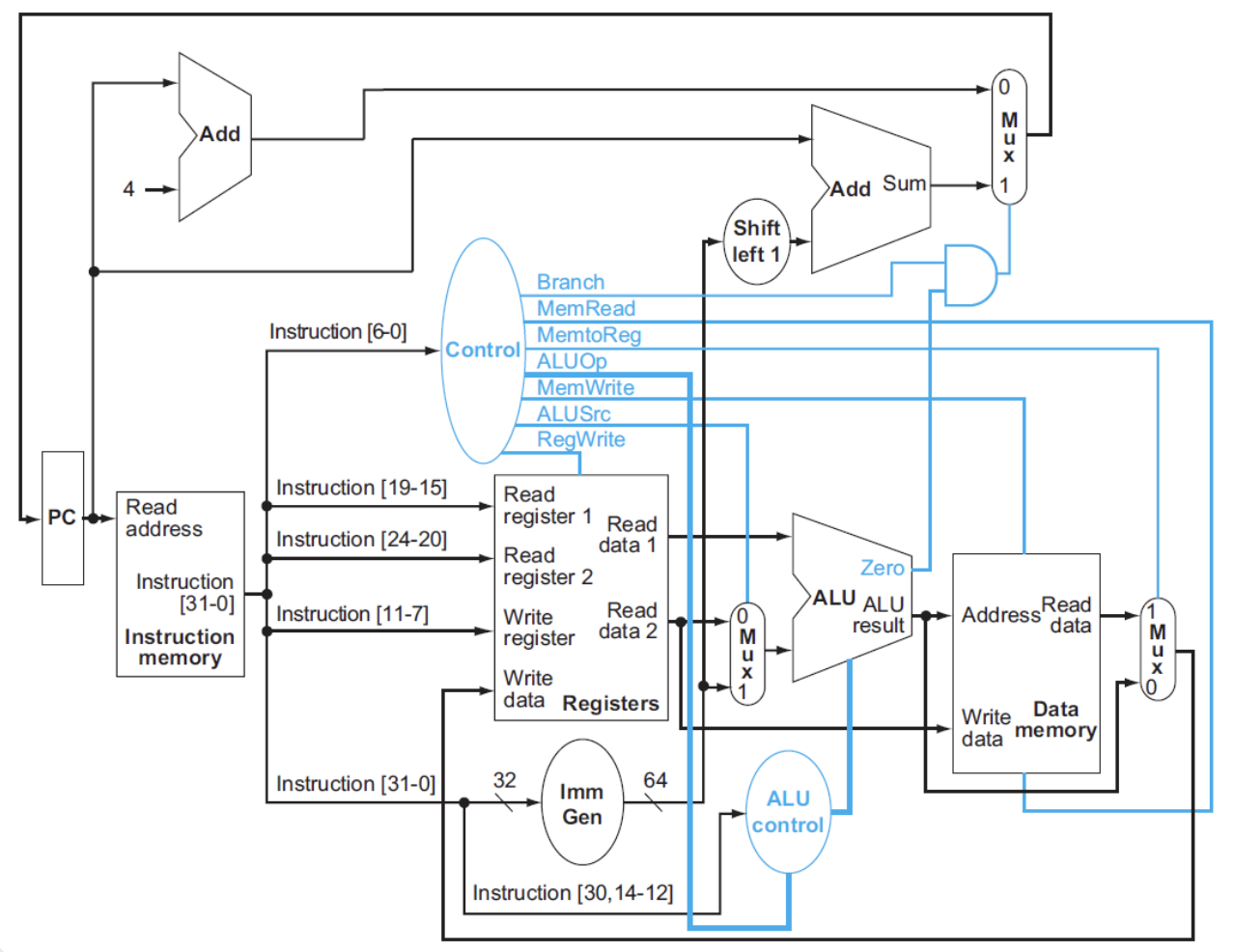
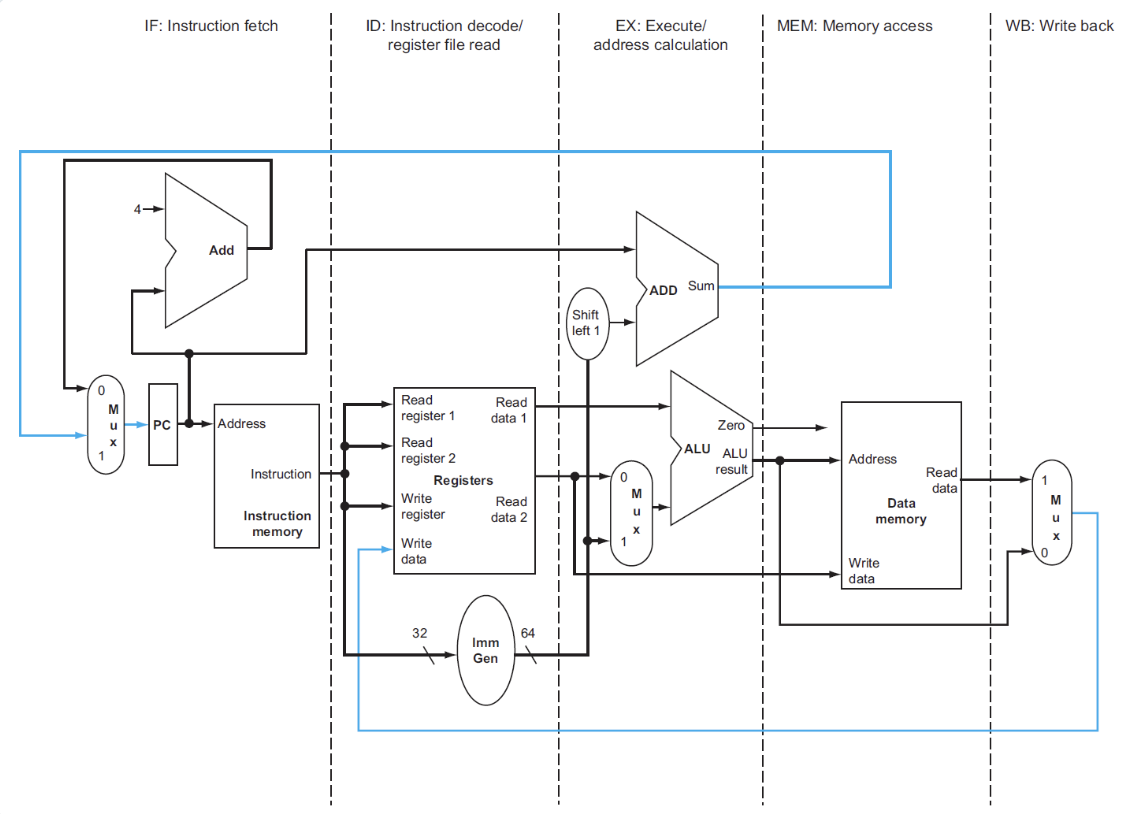
Datapath¶
构建数据通路时,我们关心的是指令中的存储数据而不是控制信号。
Instruction Fetch¶
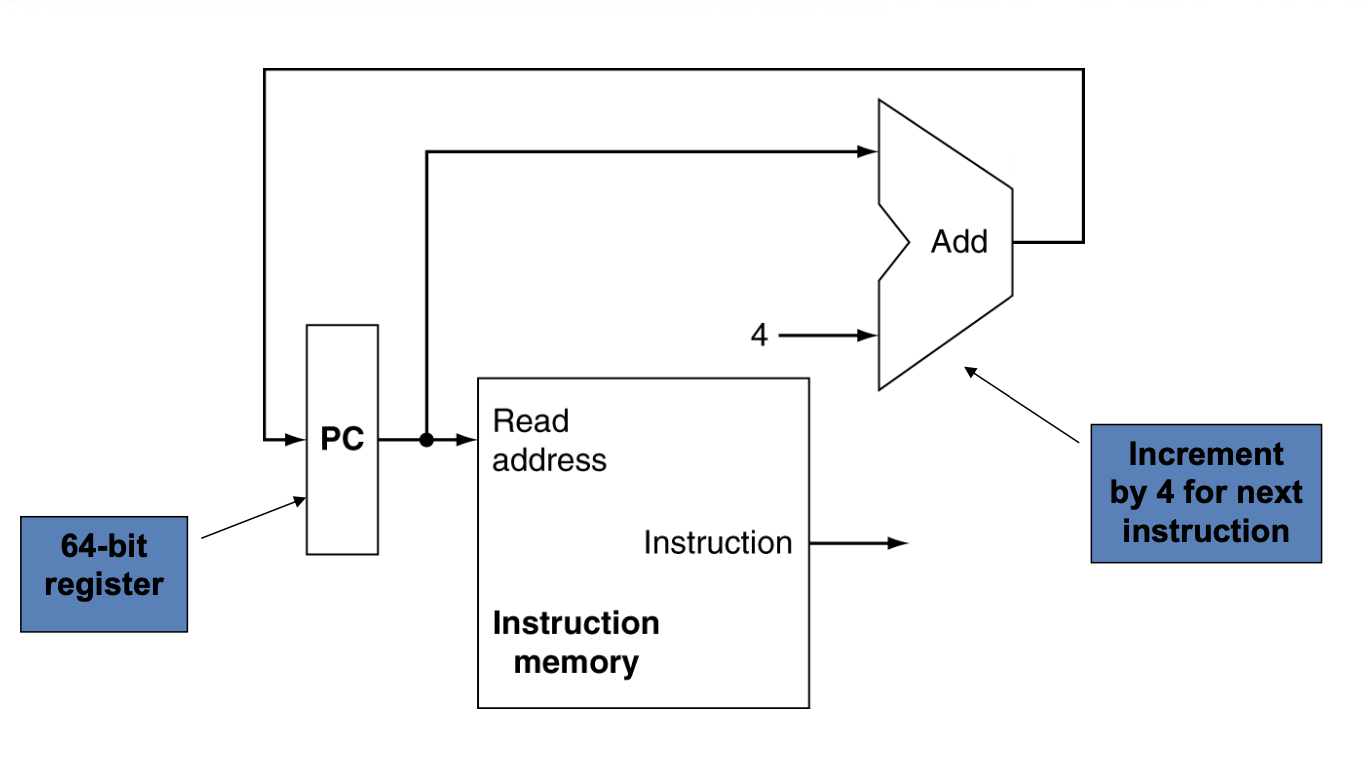
64bit寄存器,需要64个D触发器。
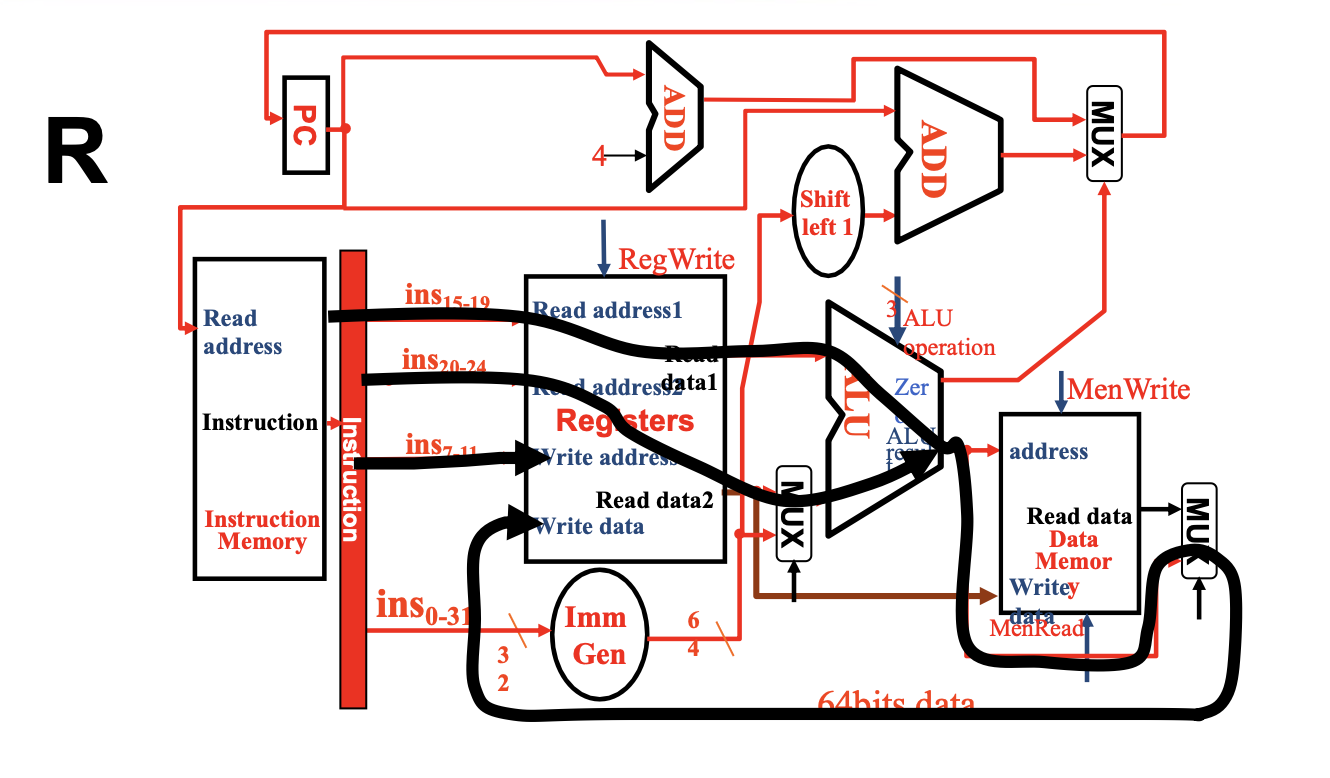
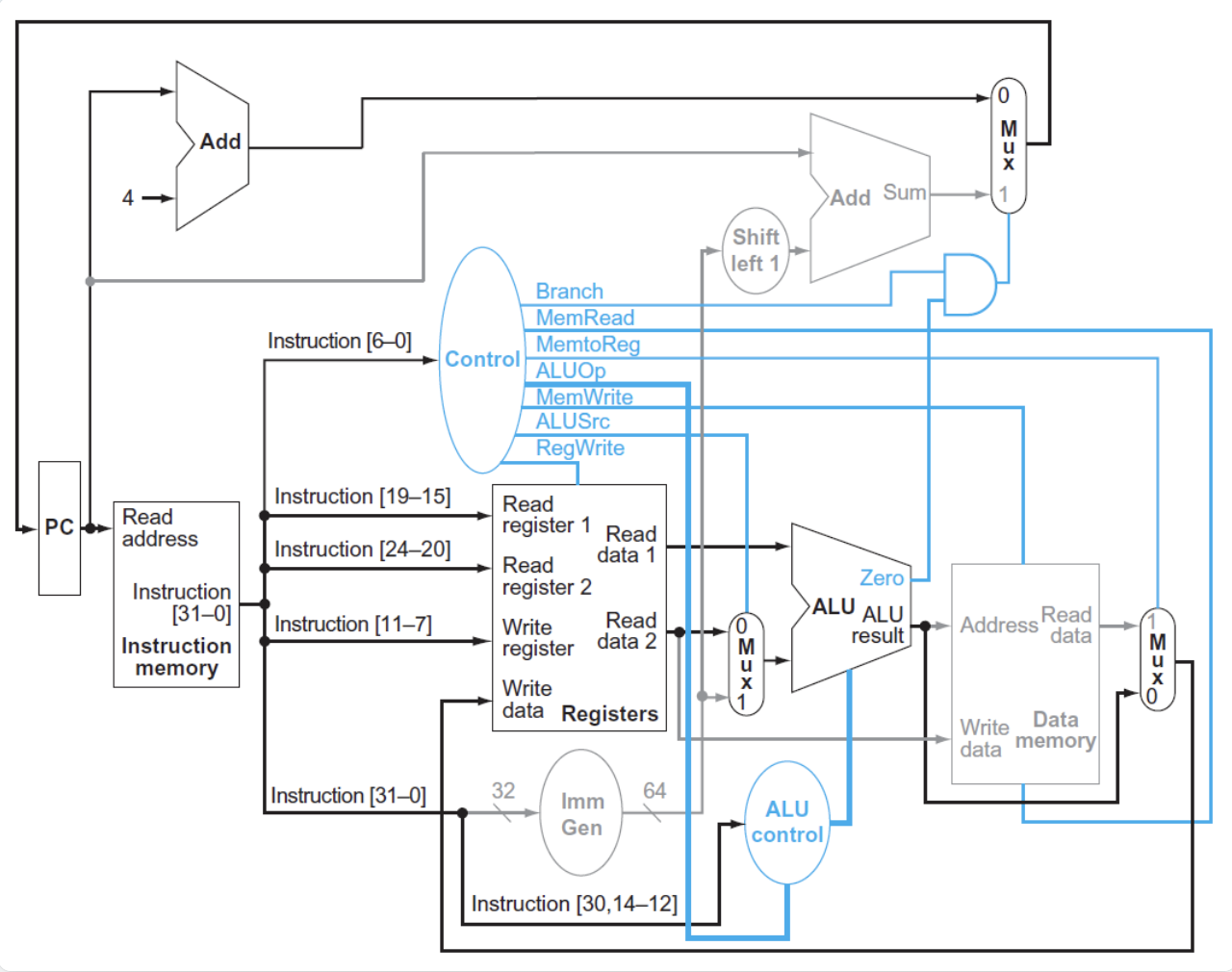
R Inst¶
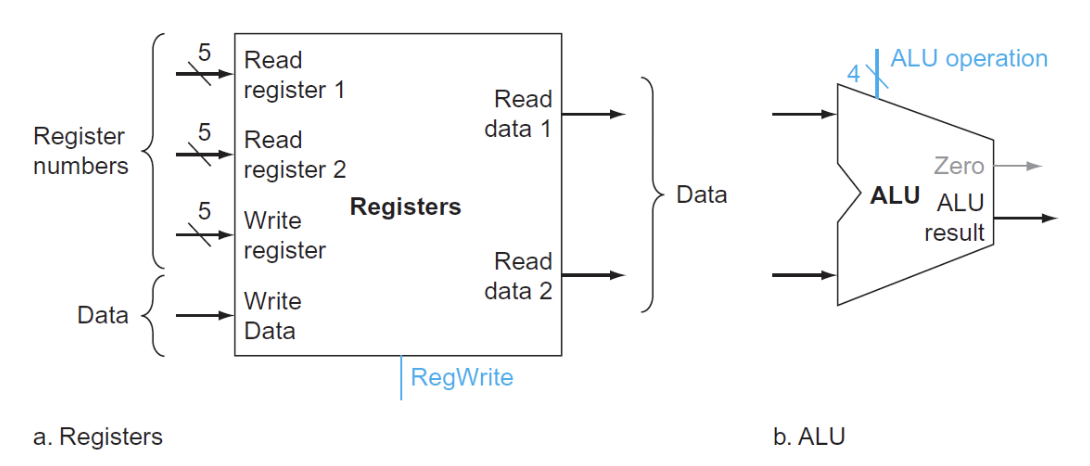
- Register File: 寄存器堆,用于存储所有寄存器
- 进行选择的wire是5位,因为寄存器有32个。
- 读取数据只需要进行选择(在R型指令前已经有ld指令将数据写入寄存器),写入数据需要受
RegWrite信号控制
- ALU: 进行算术逻辑运算
- 有一个四位的MUX进行控制,但事实上只需要三位,有一位是浪费的(但我们必须使用四位,因为MUX的输入端口数必须是2的幂次)
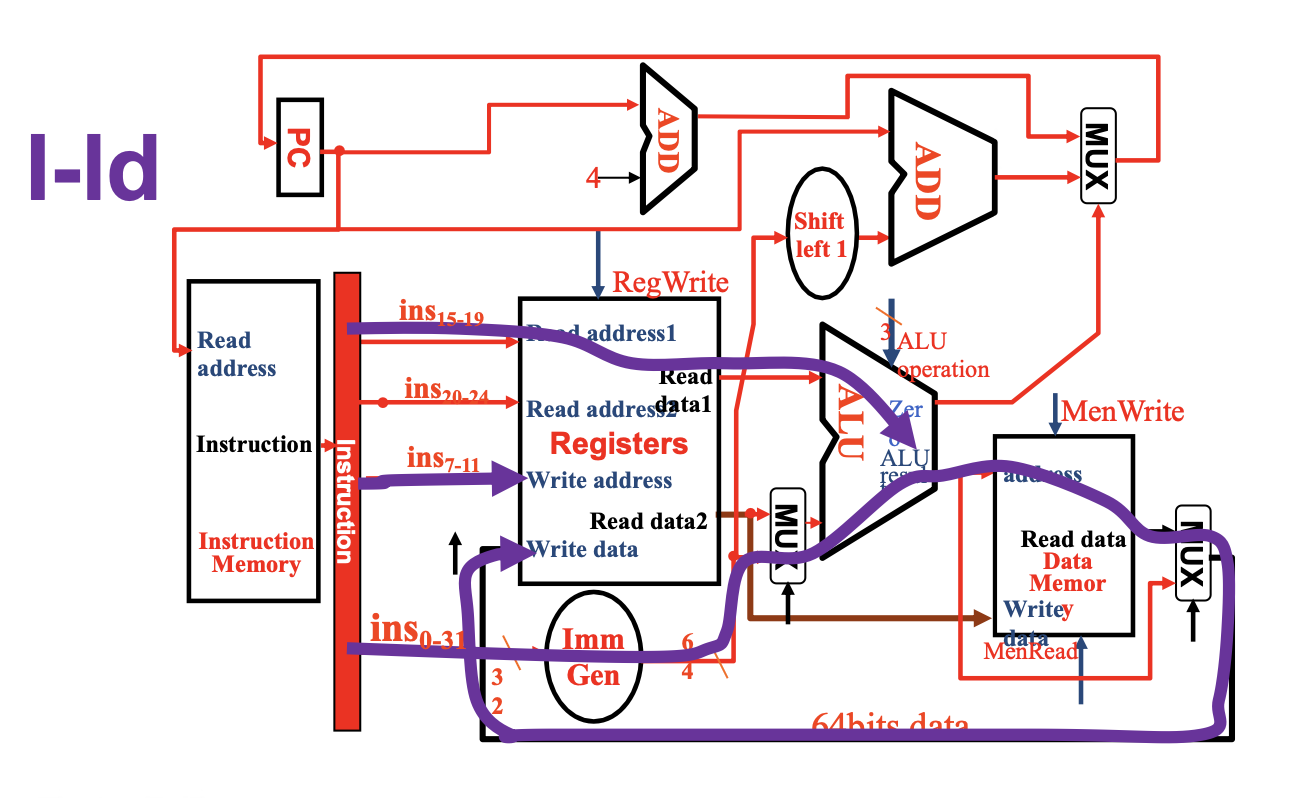
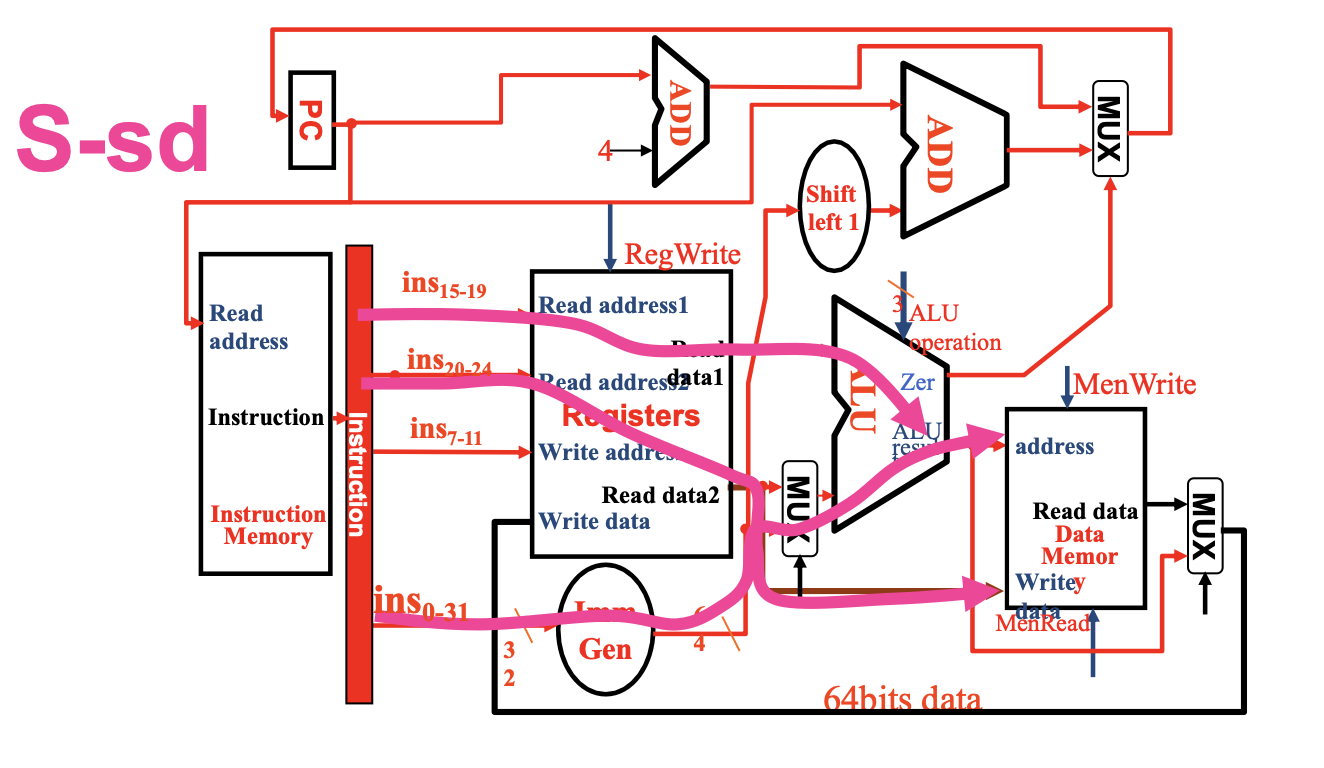
Load Store Inst¶
除了R型指令用到的两个元件,还需要两个
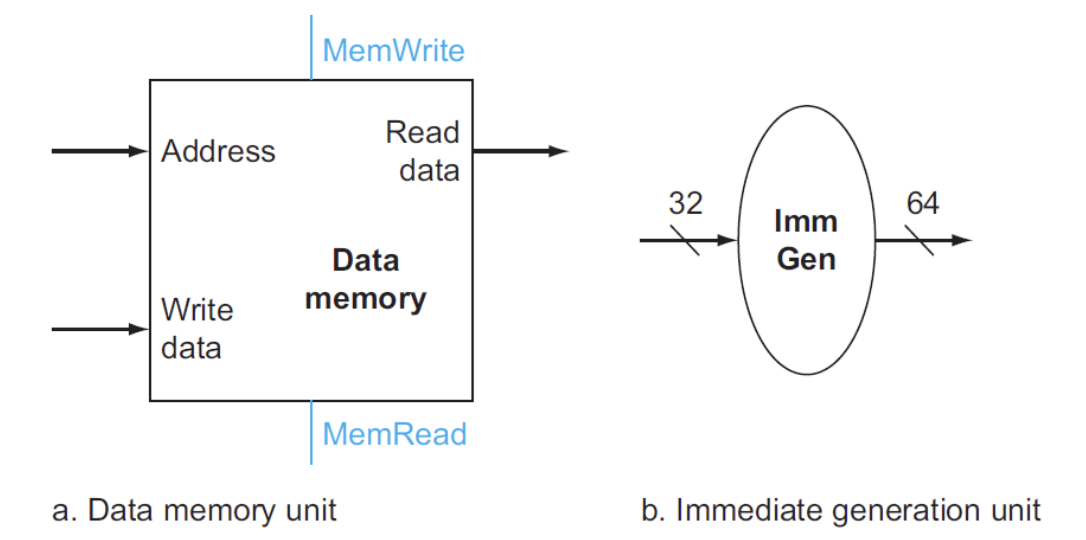
- Data Memory: 数据内存,不同于Register File,Data Memory同时具有读写控制
- 读取数据ld需要受
MemRead信号控制,写入数据sd需要受MemWrite信号控制- 内存的读取需要控制信号的原因是:并不是所有指令都会有访存操作,所以那些用不到内存值的指令就没必要读取内存数据,因此需要控制信号来关闭这扇门;而所有指令都要从寄存器堆里读取数据,因此寄存器堆的读取无需控制信号
- 读取数据ld需要受
- Imm Gen: 从 32 位指令中提取出与立即数相关的位,将这些位按正确的顺序拼接起来,同时对其符号扩展至 64 位
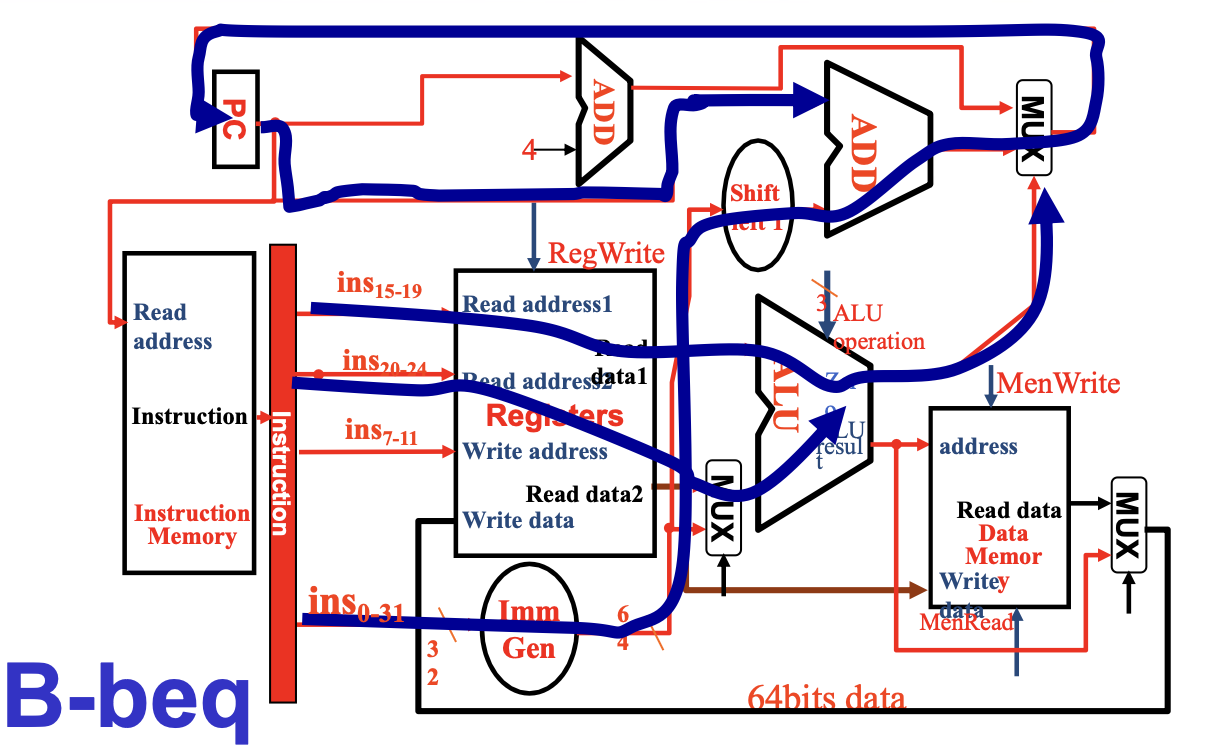
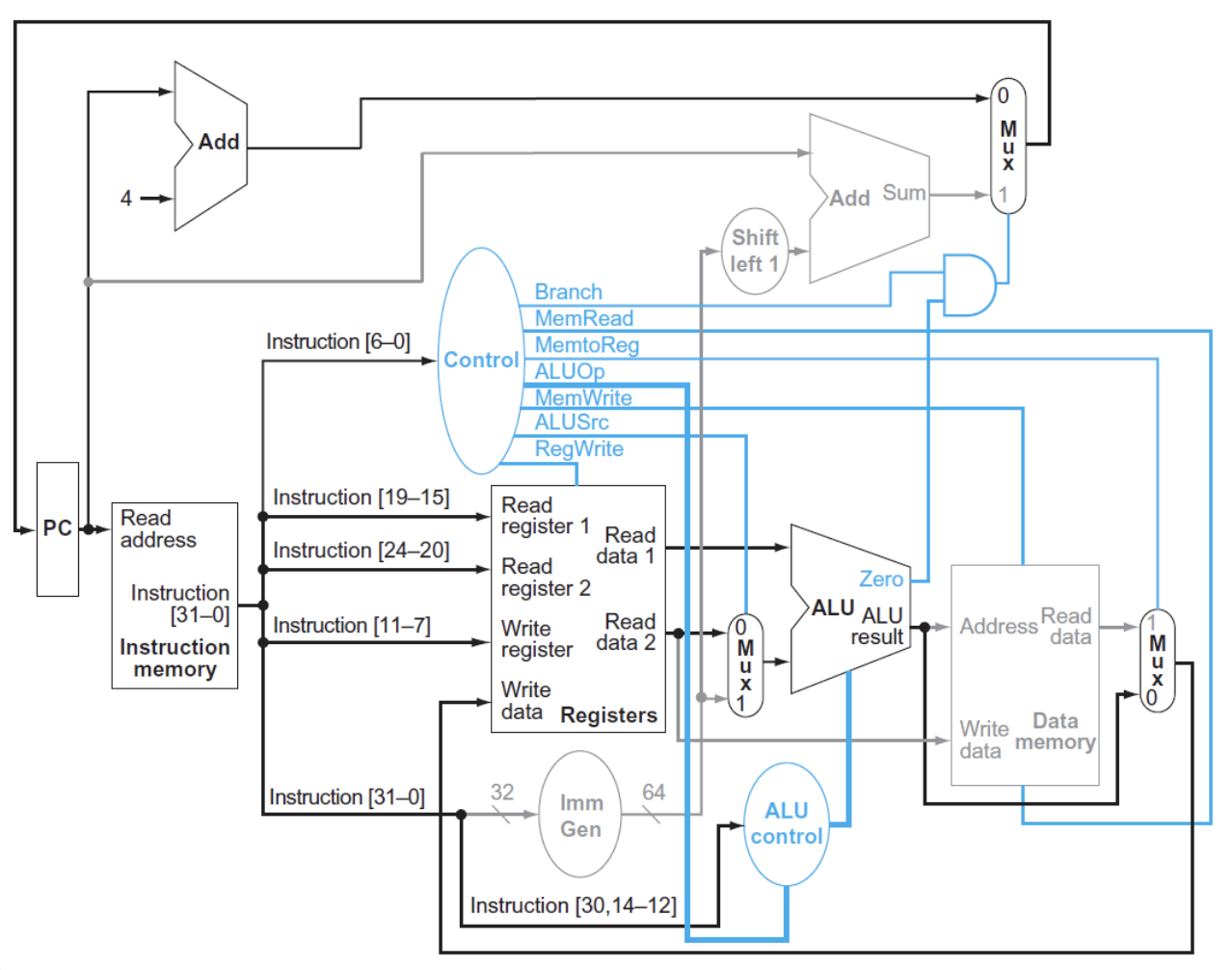
Branch Inst¶
这里只考虑了beq指令
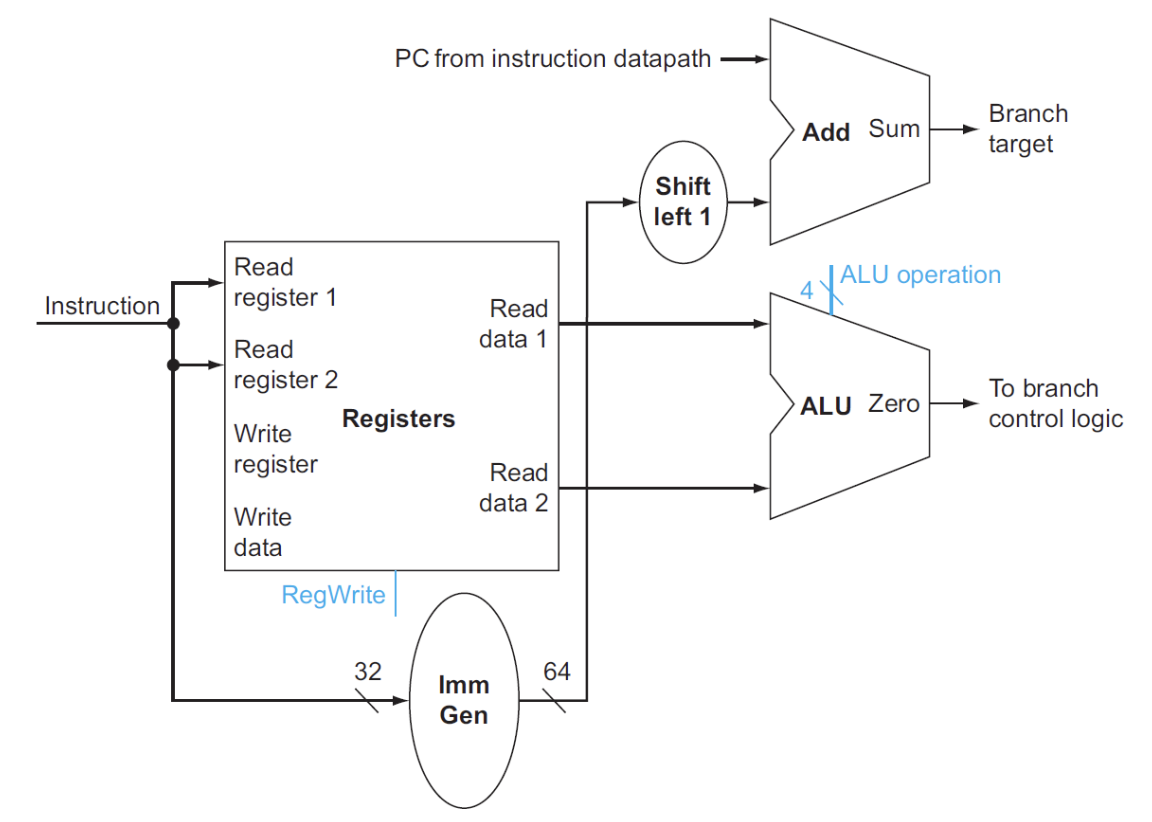
- 寄存器用于存放两个被比较的源操作数,进入ALU进行比较
- ALU:第一个ALU的作用是进行比较,并且有一个zero用于判断是否相等进而选择PC+4还是branch target address;第二个ALU只有加法,用于计算branch target address
- Shift left 1:根据之前学到的,在进行branch target address计算时,我们所需的offset在立即数中是真实值的一半,因此对于Imm Gen输出的立即数,我们需要进行左移一位的操作乘2
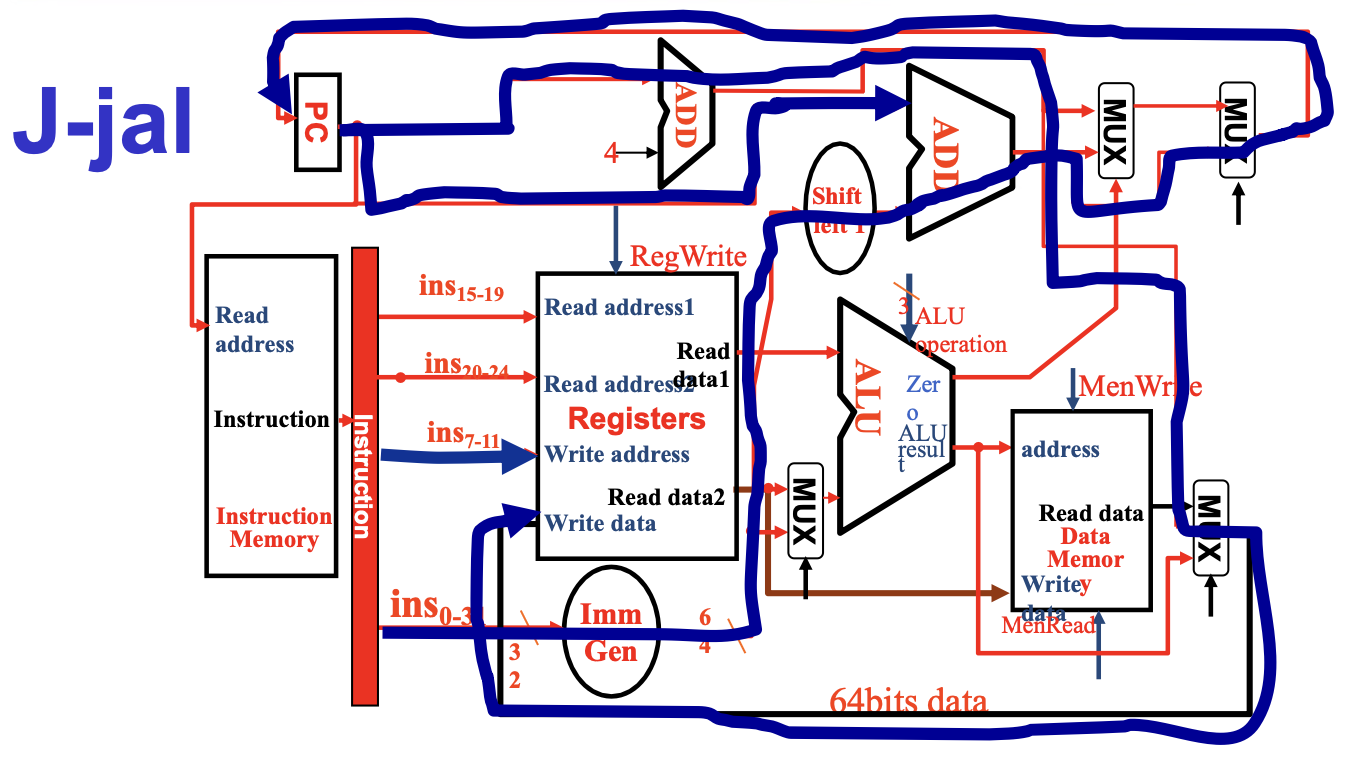
Compose¶
- 每个数据通路都是单周期的
datapath
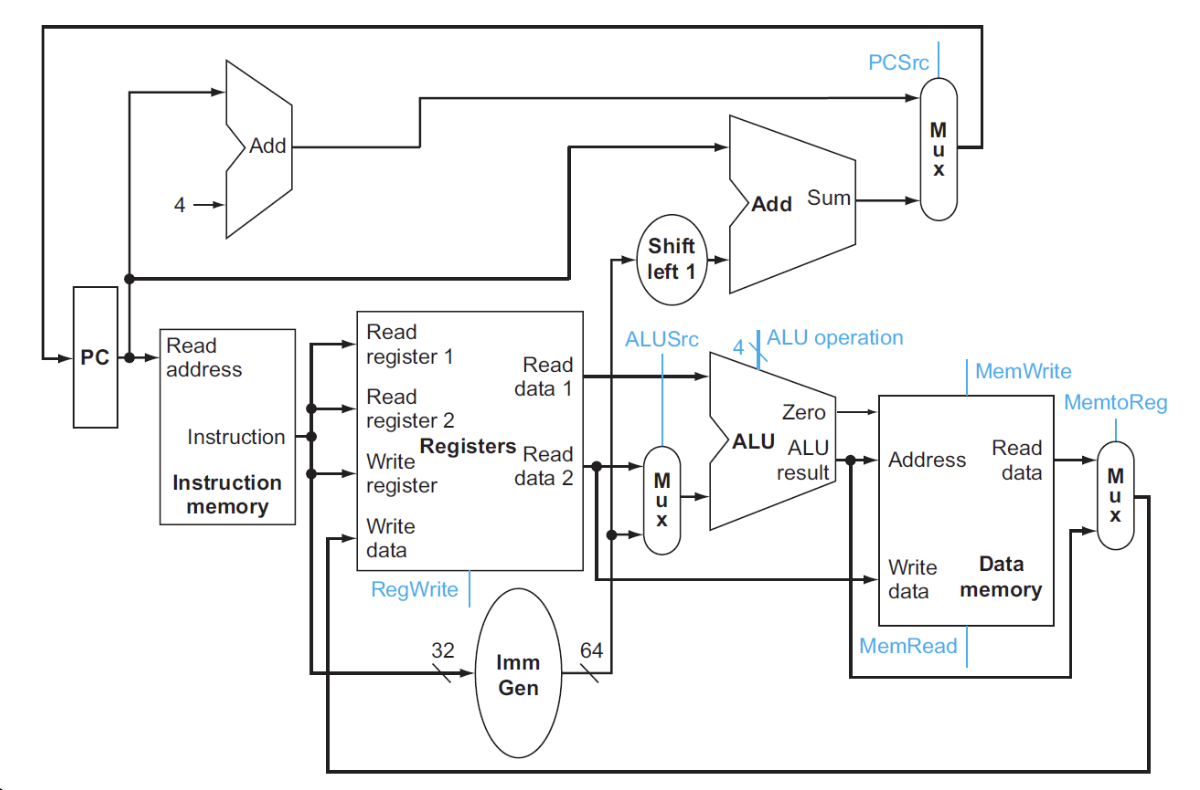
All types' datapath
R-type 的指令是完全建立在Register File上的,没有与内存的交互,使用R指令一定是在内存读取后进行的。
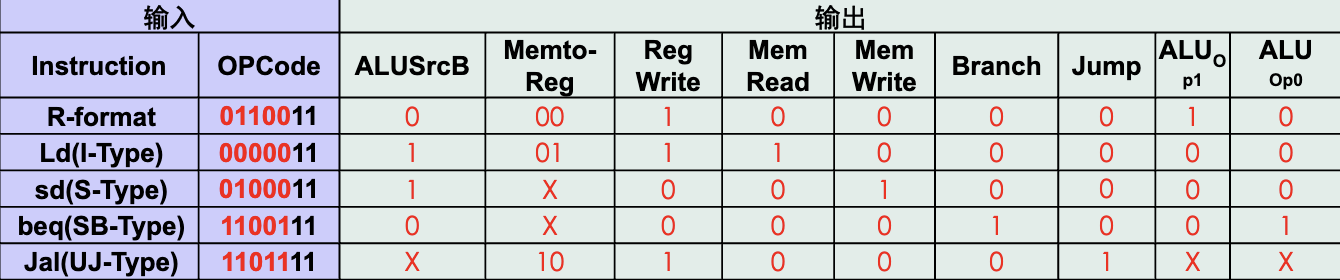
Control Unit¶
只有7+4根信号
实际上只需要处理八个信号
8 signals
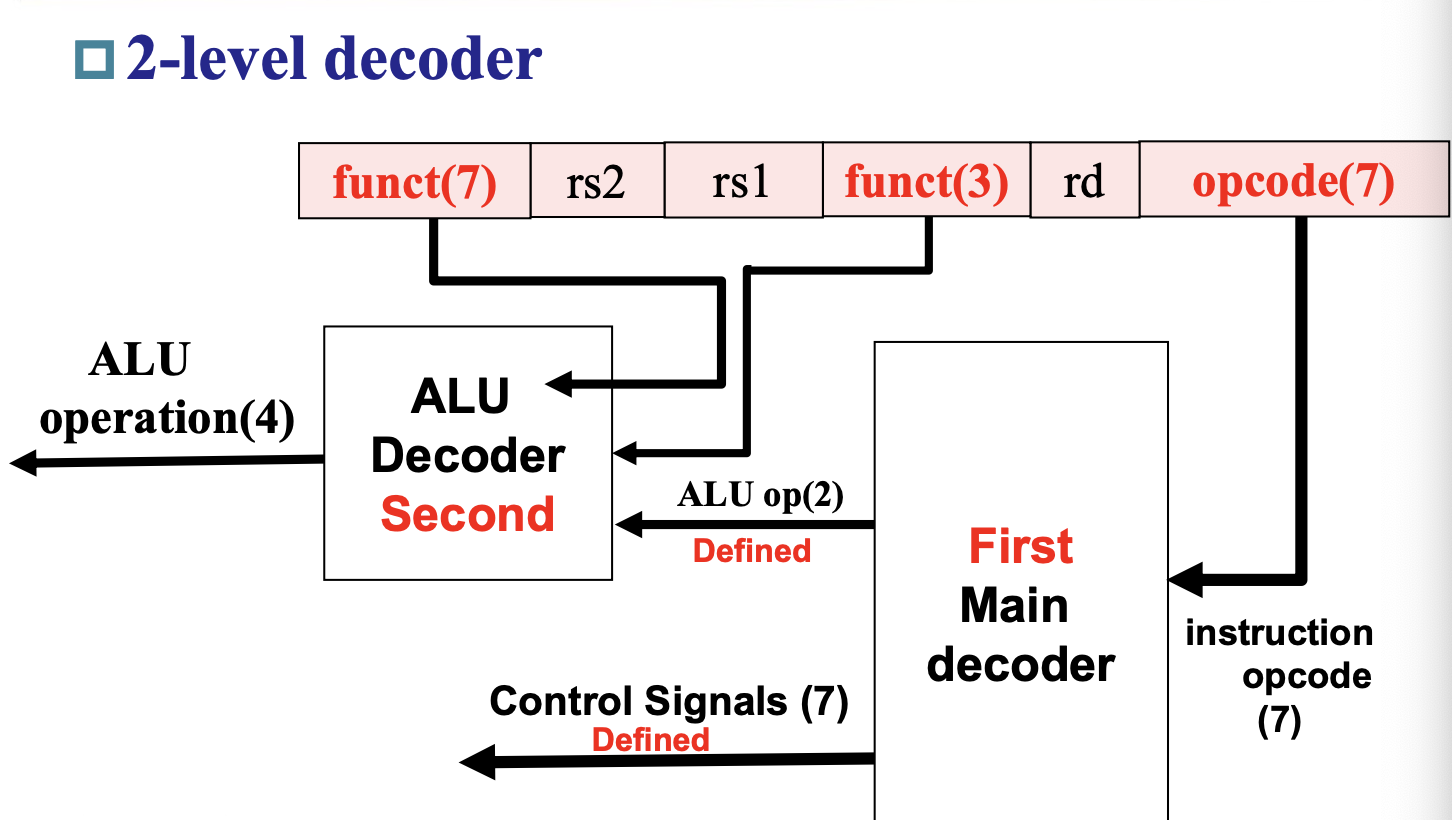
ALU Control¶
ALU的控制信号一共有4位:
- 其中2位分别来自funct3和funct7
- 另外2位是来自ALUop,它来自主控制单元 (main control unit),用于指定具体执行何种指令,不同的值对应不同的类型:
- 00:加载/存储指令
- 01:条件分支指令
- 10:R型指令
- 11:I型指令(addi andi)好像会用到?
ALU control
| Instruction opcode | ALUOp | Operation | Funct7 | Funct3 | Desired ALU action | ALU control Input |
|---|---|---|---|---|---|---|
| ld | 00 | load doubleword | XXXXXXX | XXX | add | 0010 |
| sd | 00 | store doubleword | XXXXXXX | XXX | add | 0010 |
| beq | 01 | branch if equal | XXXXXXX | XXX | subtract | 0110 |
| R-type | 10 | and | 0000000 | 111 | AND | 0000 |
| R-type | 10 | or | 0000000 | 110 | OR | 0001 |
| R-type | 10 | add | 0000000 | 000 | add | 0010 |
| R-type | 10 | sub | 0100000 | 000 | subtract | 0110 |
| R-type | 10 | slt | 0000000 | 010 | slt | 0111 |
| R-type | 10 | srl | 0000000 | 101 | srl | 0101 |
| R-type | 10 | xor | 0000000 | 011 | xor | 0011 |
采用两级解码,根据opcode就可以判断7根信号线的值,这时候 ALU 再看funct3和funct7就可以判断出剩下的4根信号线的值。
Main Control Unit¶
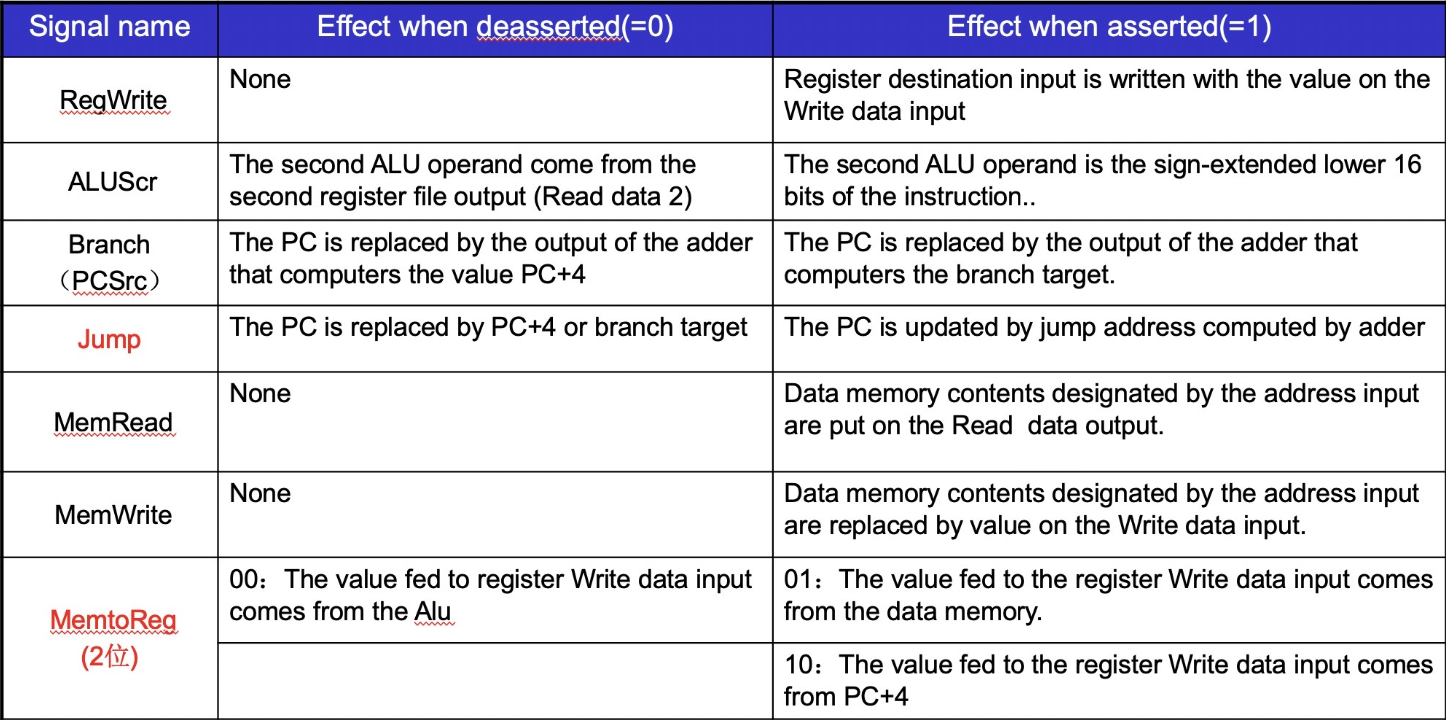
余下的六个控制信号的作用如下:
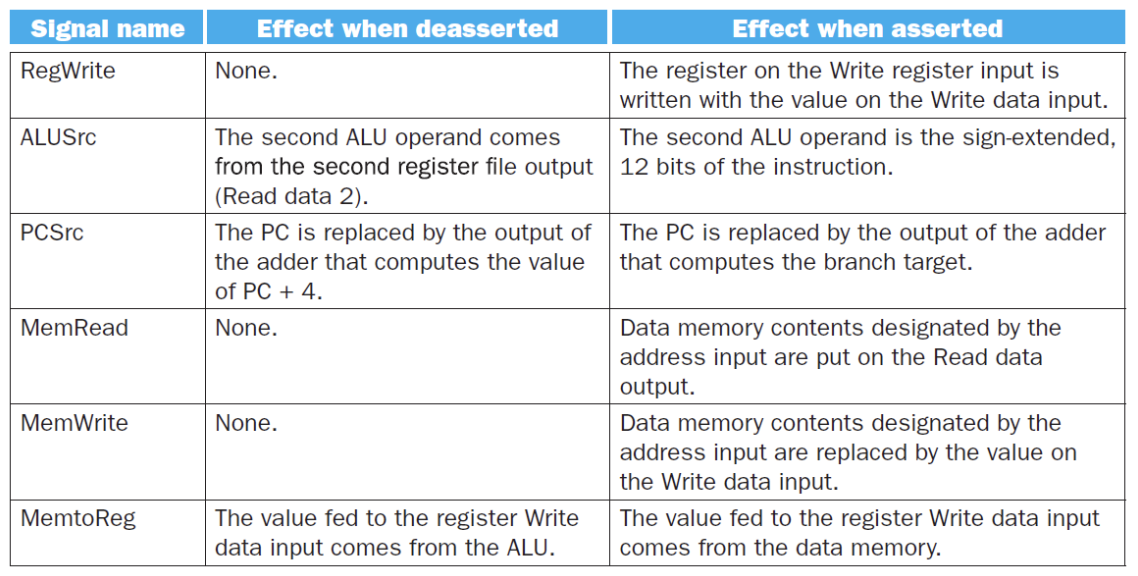
- ALUSrc: 决定ALU的第二个输入,0时从寄存器堆中读取数据,1时从立即数中读取数据
- PCSrc: 决定PC的值,0时选择PC+4,1时选择branch target address
- MemtoReg: 00时将ALU的结果返回给目标寄存器,01时将内存中的数据返回给目标寄存器,
最终:
 ¶
¶
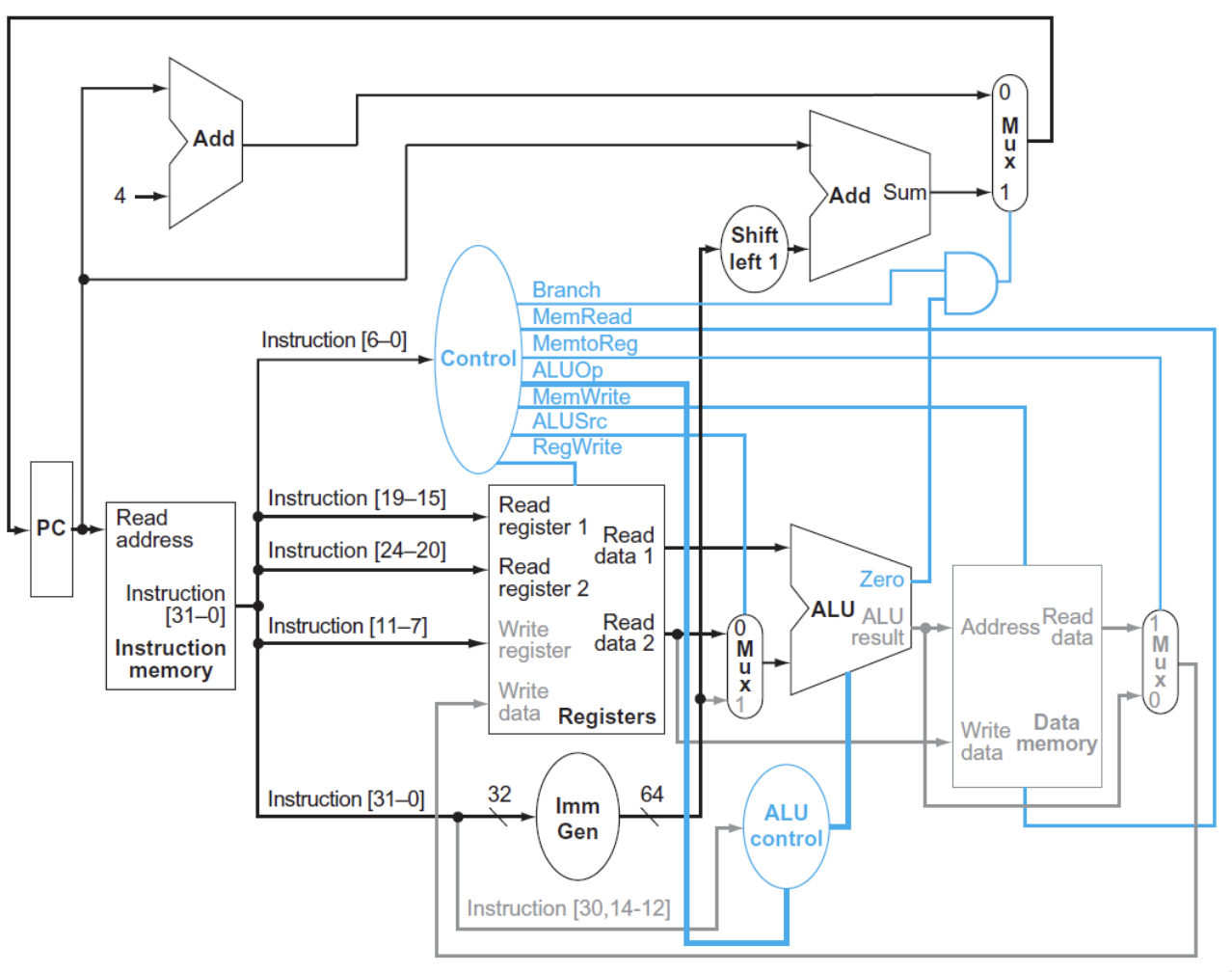
Operation of Datapath¶
灰色的元件代表没有被使用
- IF:取指,递增PC
- ID:从寄存器堆中读取x2
- EX:ALU计算x2的数据和经过imm符号扩展的offset的和,得到内存地址
- MEM:根据地址得到对应数据
- WB:将数据写入x1
Pipelining Process¶
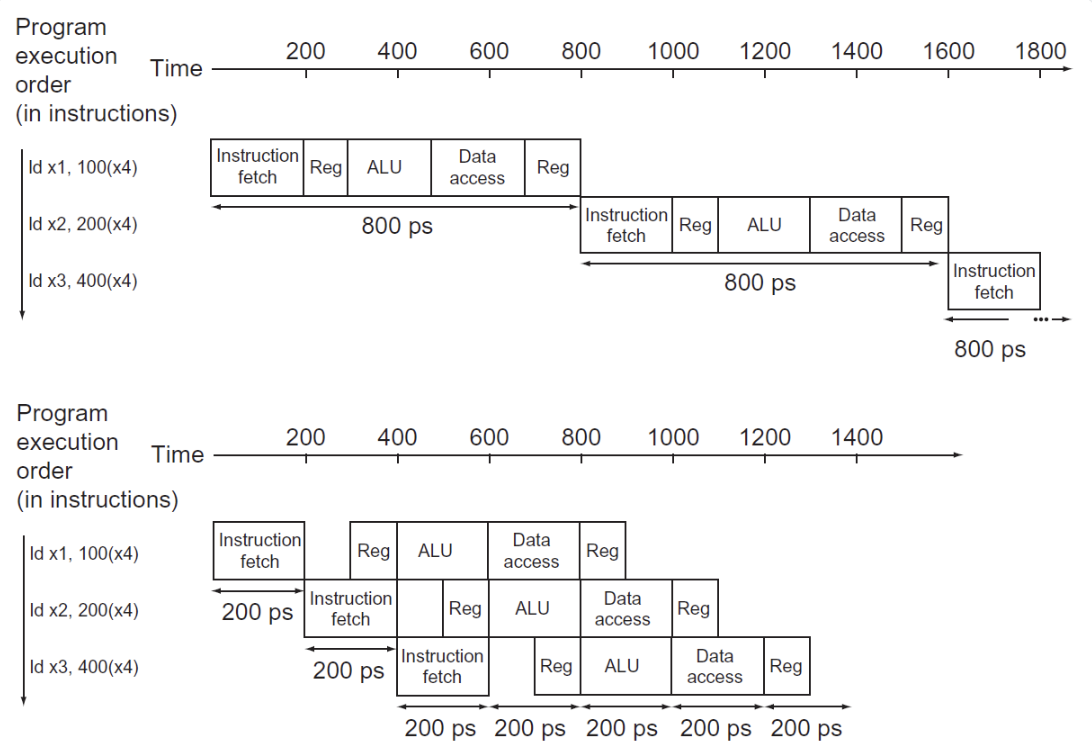
流水线Pipeline的本质是提高吞吐量,通过将指令的执行过程分解为多个阶段,每个阶段在不同的时钟周期内执行,从而在每个时钟周期内完成多条指令的执行。
在RISC-V中,流水线Pipeline的实现方式是:
- IF: Instruction Fetch 从指令内存中取出指令
- ID: Instruction Decode 解码指令
- EX: Execute 执行指令
- MEM: Memory Access 访问内存
- WB: Write Back 写回寄存器
pipeline
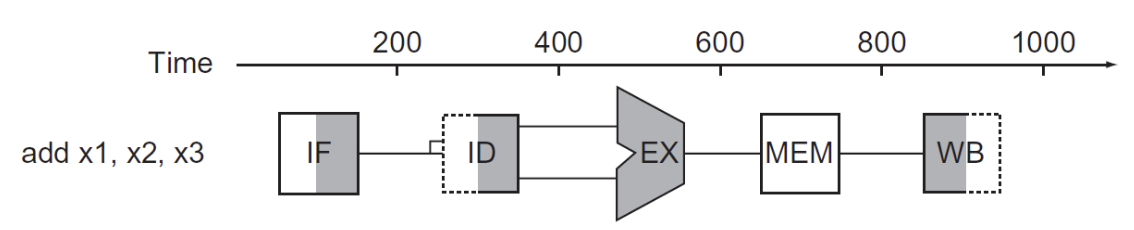
图形左半边阴影是写入,右半边阴影是读取,全阴影是都有(这里假设在一个时钟周期内,元件的前半个周期可以进行写操作,后半个周期可以进行读操作)
寄存器读写
注意到对于寄存器的读写操作,只占用时钟周期的一半,但是ID和WB的完成分别是在一个时钟周期的前后两个部分,只是因为有时对寄存器的操作是同时进行的,为了避免冲突,所以才将ID和WB的完成时间错开,这一操作是通过将读写的操作分别由clk的上升沿和下降沿完成实现的
但是不是所有指令都需要执行所有阶段的指令的,比如load和store指令就不需要执行EX和MEM阶段。
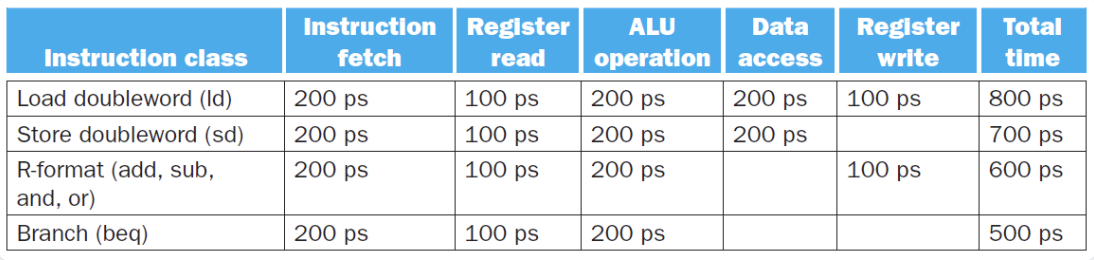
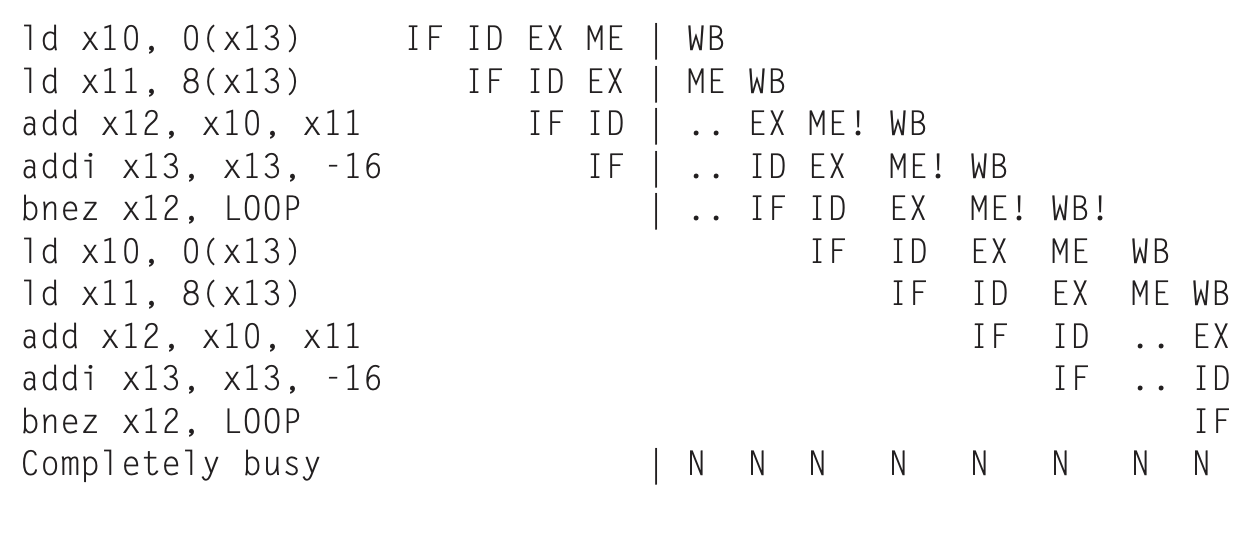
性能方面:理想条件下
时钟周期
流水线CPU的时钟周期 = 耗时最长的阶段所花的时间
- 只有当每个阶段的时间相等的理想情况发生,才会有上述的性能提升
- 同时对于Latency,每个指令是不减的
Success
Pipeline 是通过增加通量(throughput)来提高性能的,而不是减少Latency
Hazards¶
Harzard(竞争):
是指由于某种原因指令无法按照预期顺序继续执行,分为以下三种:
-
Structure Hazards
- 需要的资源被占用,导致指令无法继续执行
- 如多条加载存储指令在同一个时钟周期内对同一块内存进行访问
-
Data Hazards
- 需要等待上一条指令完成数据写入或者读取完成才能进行后续操作
- 解决方案:添加额外的硬件前递(forwarding)或称为旁路(bypassing)
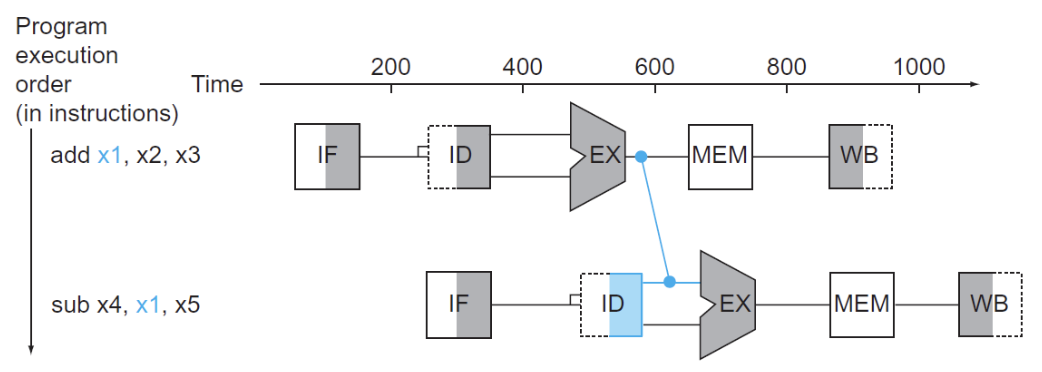
只有当目标阶段比源阶段晚时,才能进行前递
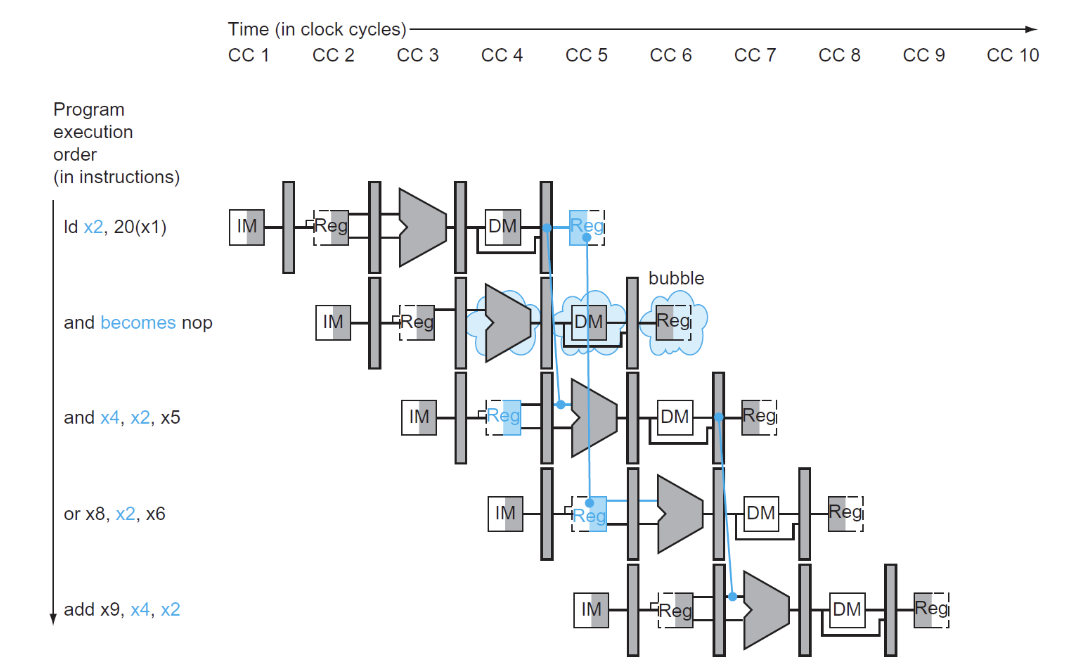
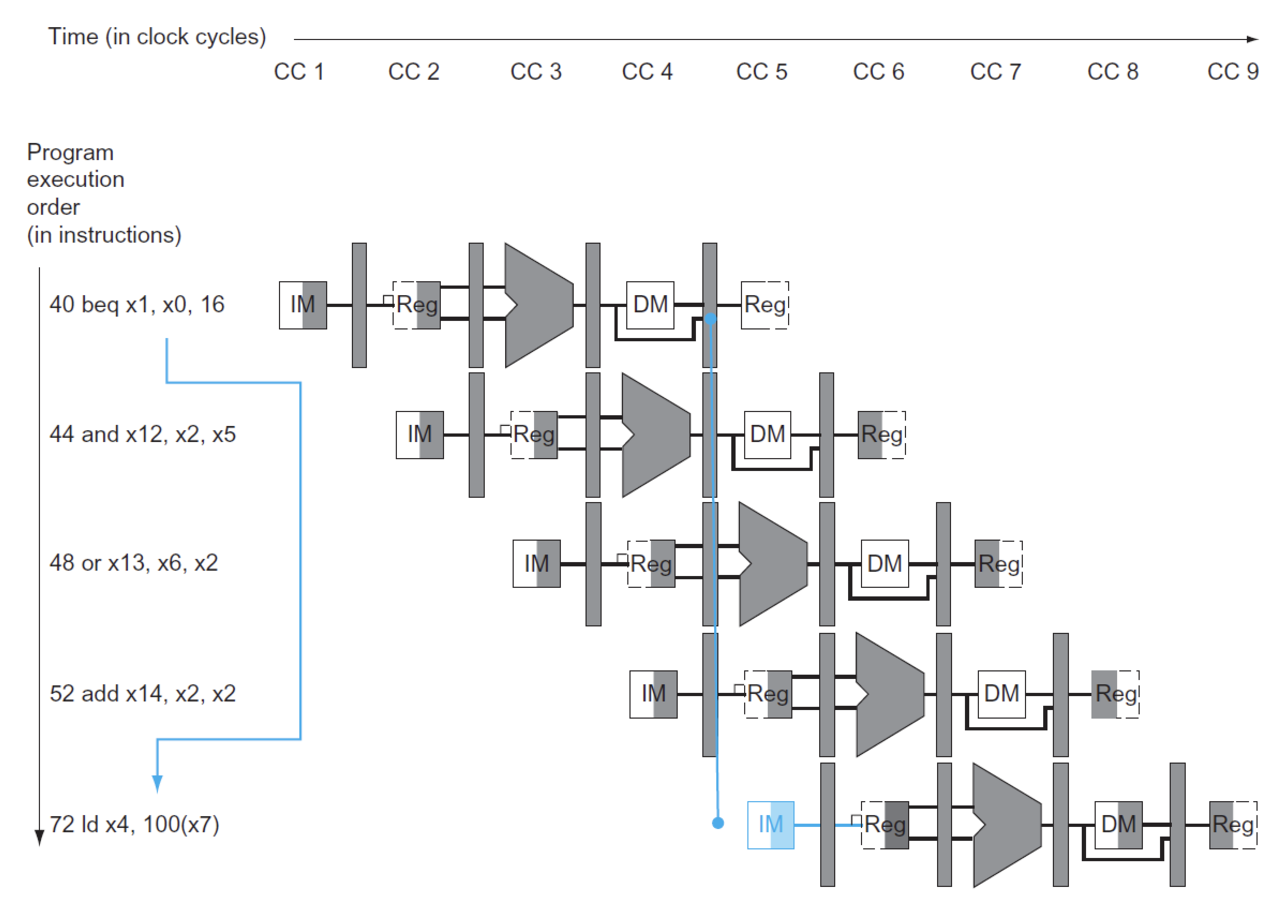
- 这一情况对于R型指令是适用的,但是如果先执行加载指令,后执行依赖于该加载指令数据的指令,即使加了一个前递,CPU 还是不得不暂停一个时钟周期,这种情况称为加载使用数据冒险(load-use data hazard),如下图所示:
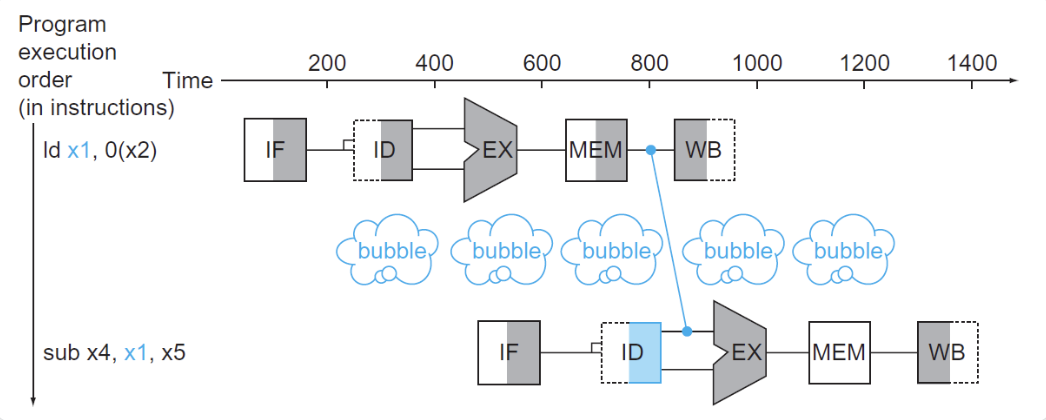
中间的气泡称为流水线停顿(pipeline stall)或者bubble
这种情况我们可以通过软件层面的优化来解决:
顺序调整
得到一个自然的汇编代码:
ld x1, 0(x31) ld x2, 8(x31) add x3, x1, x2 sd x3, 24(x31) ld x4, 16(x31) add x5, x1, x4 sd x5, 32(x31) //我们可以看到高亮的两组代码都发生了load-use data hazard,需要增加两个stallld x1, 0(x31) ld x2, 8(x31) ld x4, 16(x31) add x3, x1, x2 sd x3, 24(x31) add x5, x1, x4 sd x5, 32(x31) //因为在这里我们提前了f的读取,正好给了b读取指令时间,所以不需要增加stall了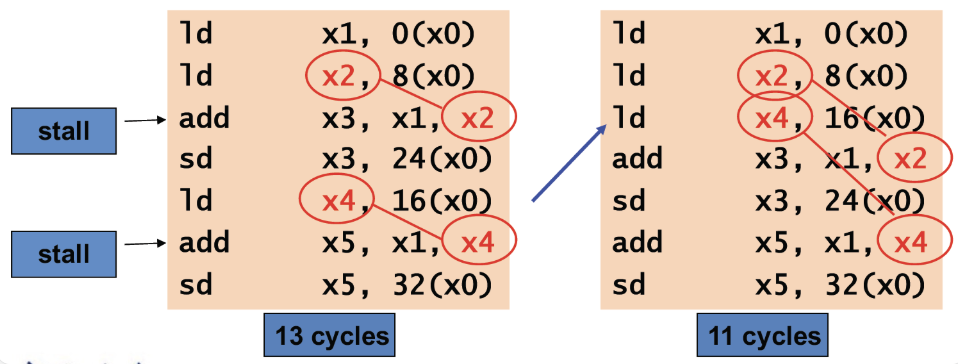
这种计算也是要掌握的,需要自己判断是否加入stall
-
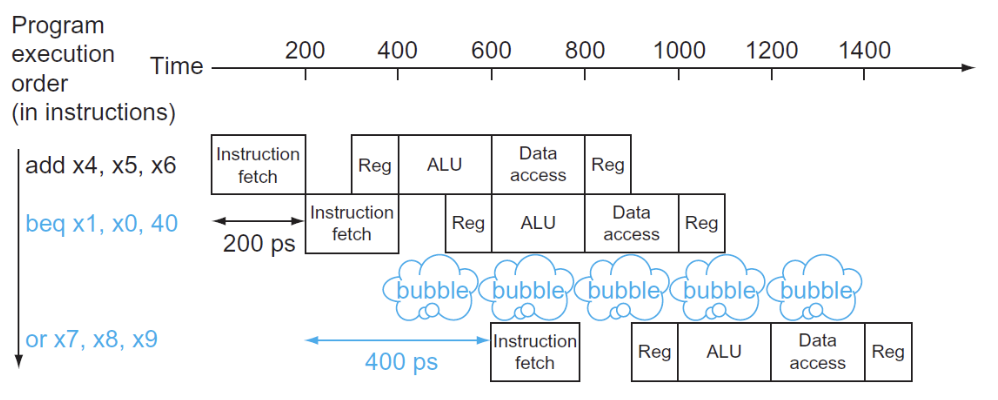
Control Hazards
- 需要决定的控制信号依赖于先前的指令,导致无法确定下一条指令的执行
- 解决方案:将寄存器的比较和目标地址的计算提前到ID阶段
- 但是这样仍然会有一个bubble的产生:
- 我们需要一个更好的解决方法:分支预测:
- 一种方法是静态预测
- 无论什么条件都进行跳转,如果成功则继续进行,如果失败就撤回错误指令,这需要一个额外的时钟周期,效果就和插入bubble一样了,这样至少提高50%效率
- 另一种方法是动态预测
DataPath in Pipeline¶
根据指令执行的阶段,将先前的datapath进行划分:
大多数情况下,指令执行的顺序都是从左到右,但是也有例外:
- 最后的写回阶段,将内存的数据写入寄存器是从右往左的(可能会导致数据冒险)
-
PC寄存器的输入数据(两种选择)是从右往左传递给PC选择MUX的(可能会导致控制冒险)
-
在流水线中我们需要储存进入执行的指令,因此需要一个额外的寄存器,叫做流水线寄存器,位于两个阶段之间
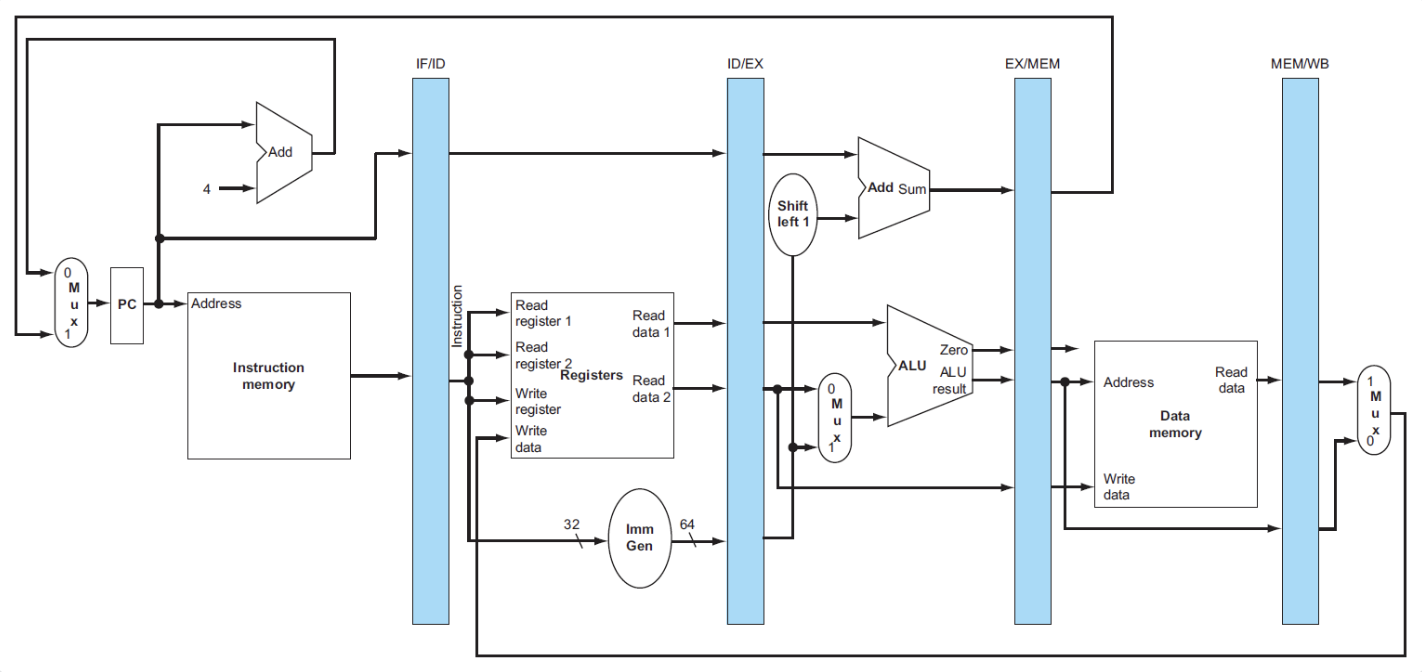
ld process of pipeline
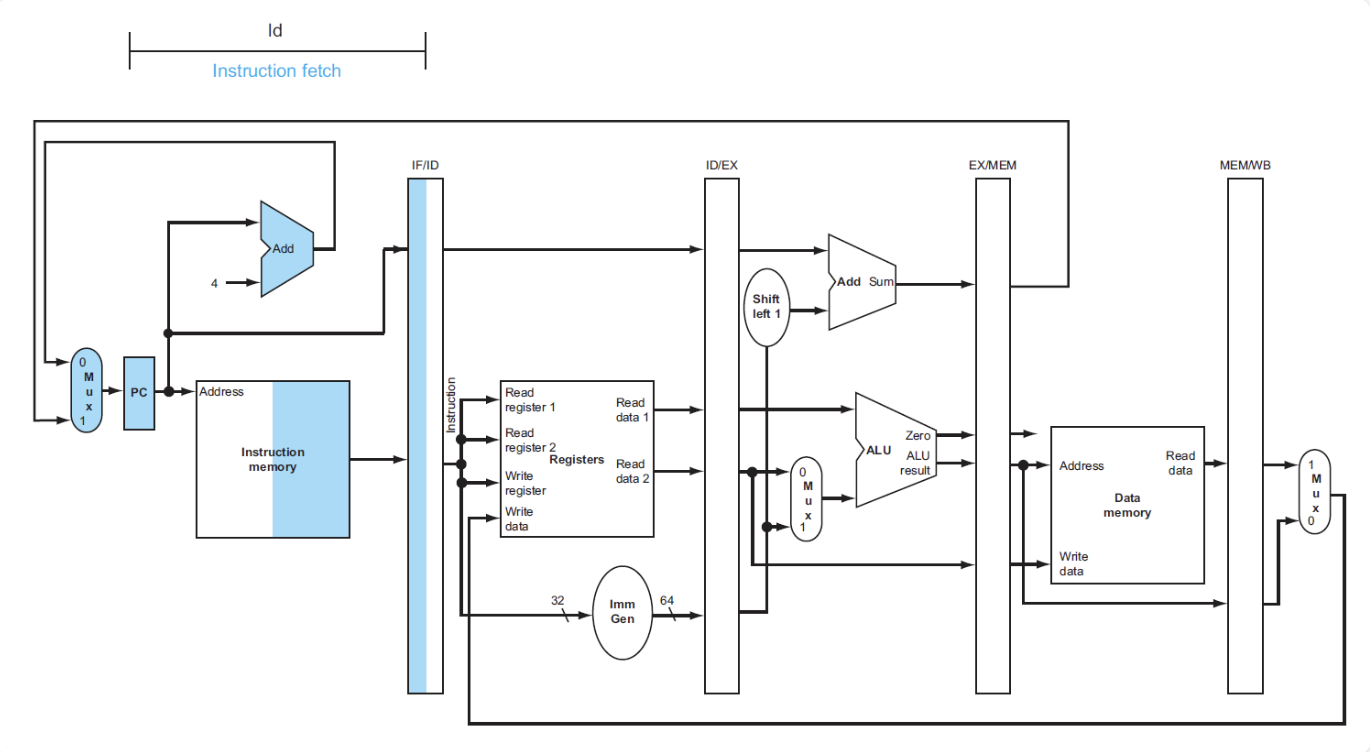
- 将PC寄存器的指令地址传给IF/ID流水线寄存器,供下一条指令使用
- 同时传递指令内容
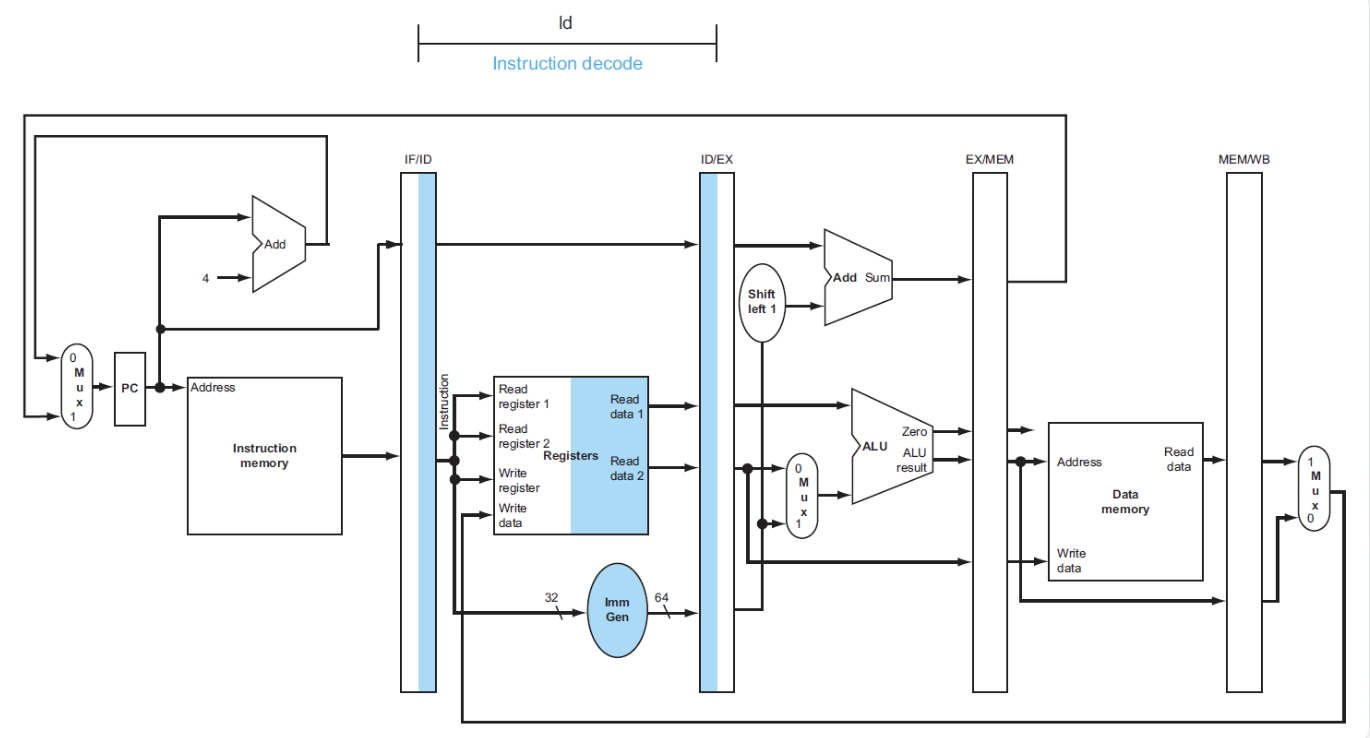
- 除了继续传递指令地址,还要传递寄存器堆的数据和立即数
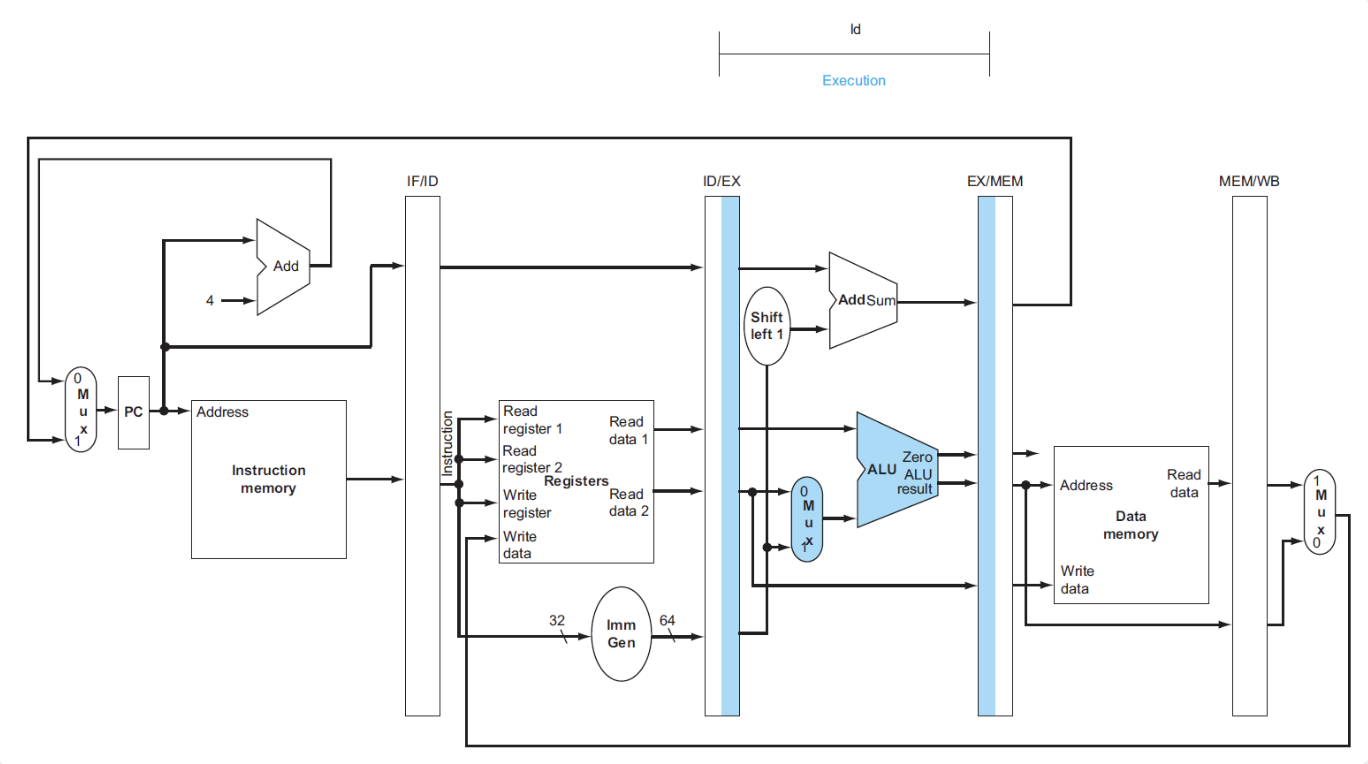
- 将计算好的内存地址放入EX/MEM
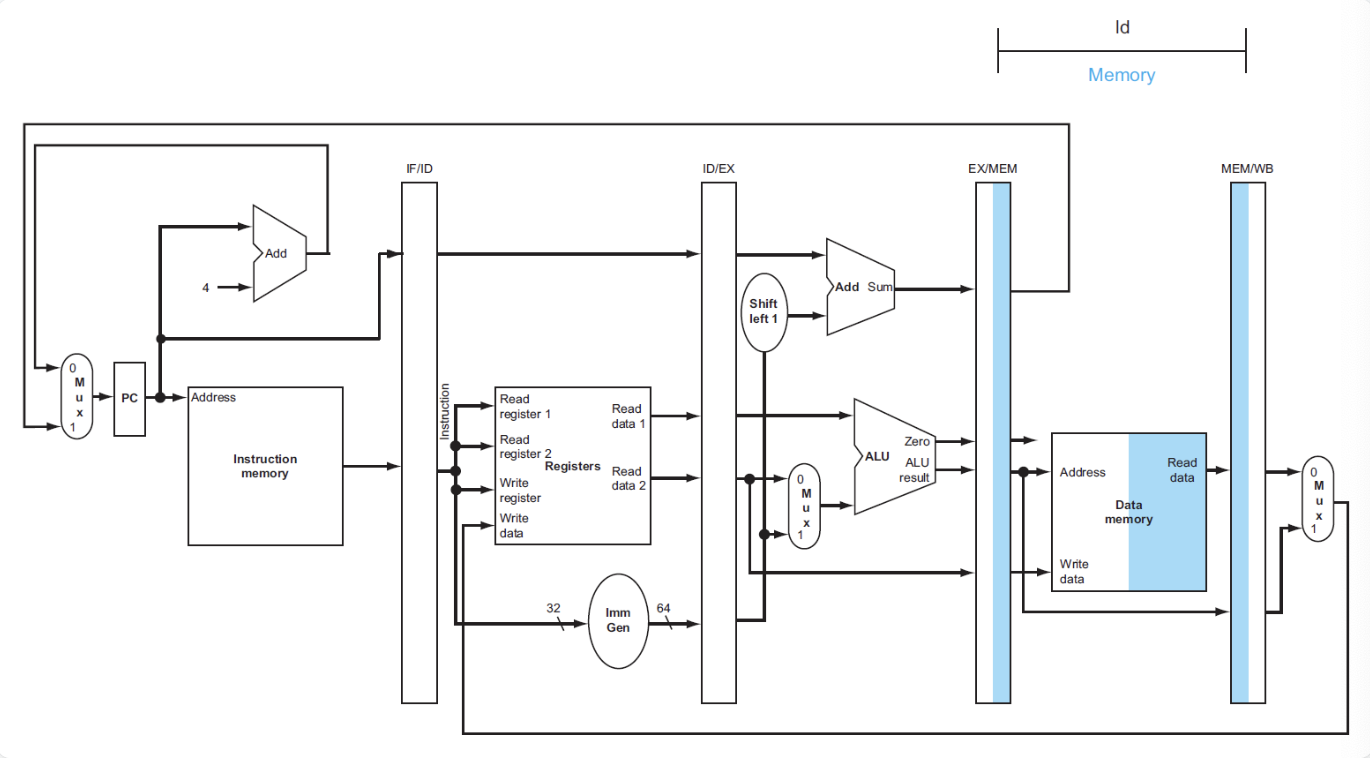
- 从EX/MEM读取内存地址,然后将对应的内存数据写入MEM/WB
- 从MEM/WB读取内存数据,然后将数据写入寄存器
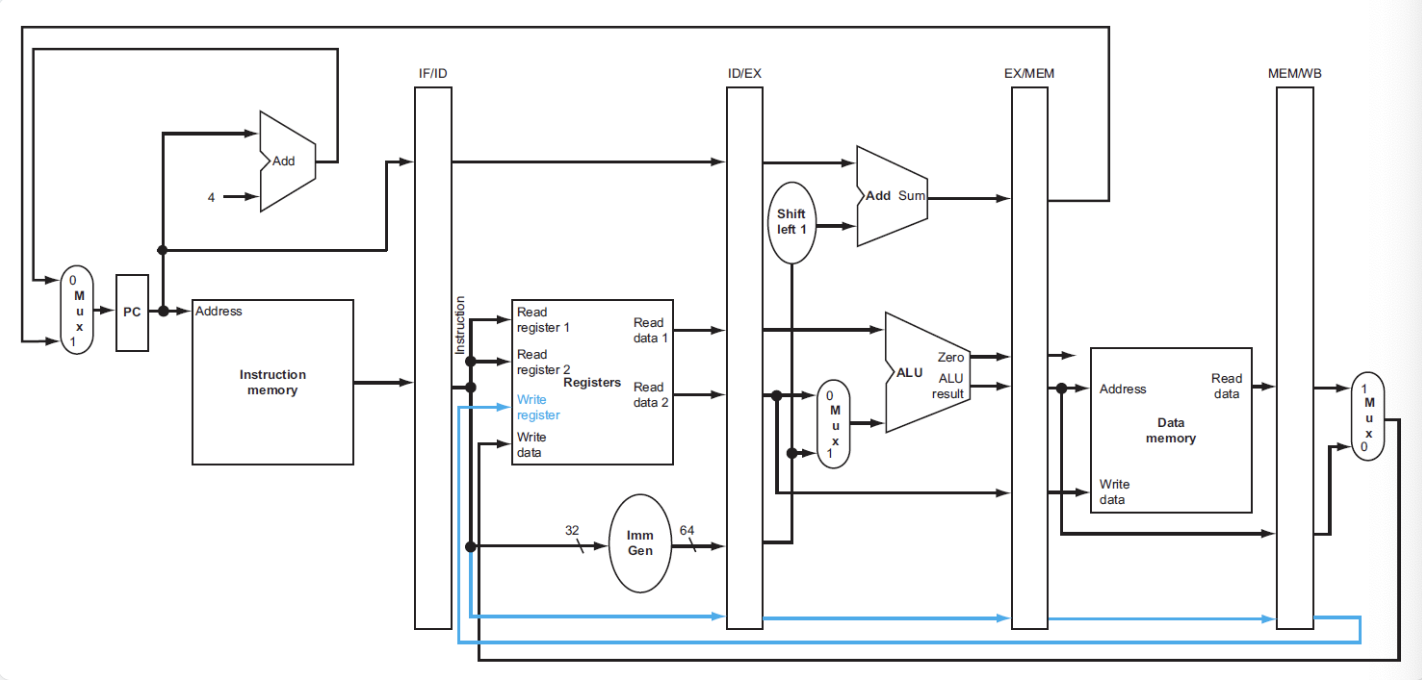
save register number
在最后写回数据时,我们的指令中已经没有需要写回的寄存器编号了,所以我们改进了这个设计,将寄存器编号放在流水线寄存器中,这样在WB阶段就可以直接使用
Control in Pipeline¶
在单周期CPU中我们引入了一系列控制信号来进行控制,在这里流水线CPU也需要控制指令,并且这些控制指令也是随着流水型寄存器的传递而传递的
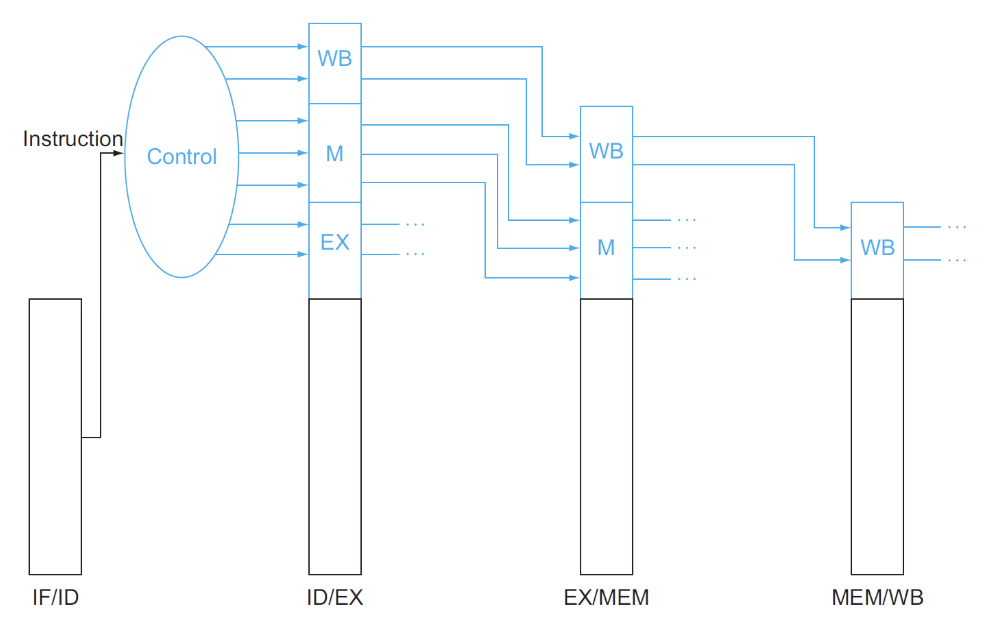
可以看到控制信号随着流水线的进行逐渐被使用,被使用的信号将不再被传递,节约了空间
在加入控制器后:
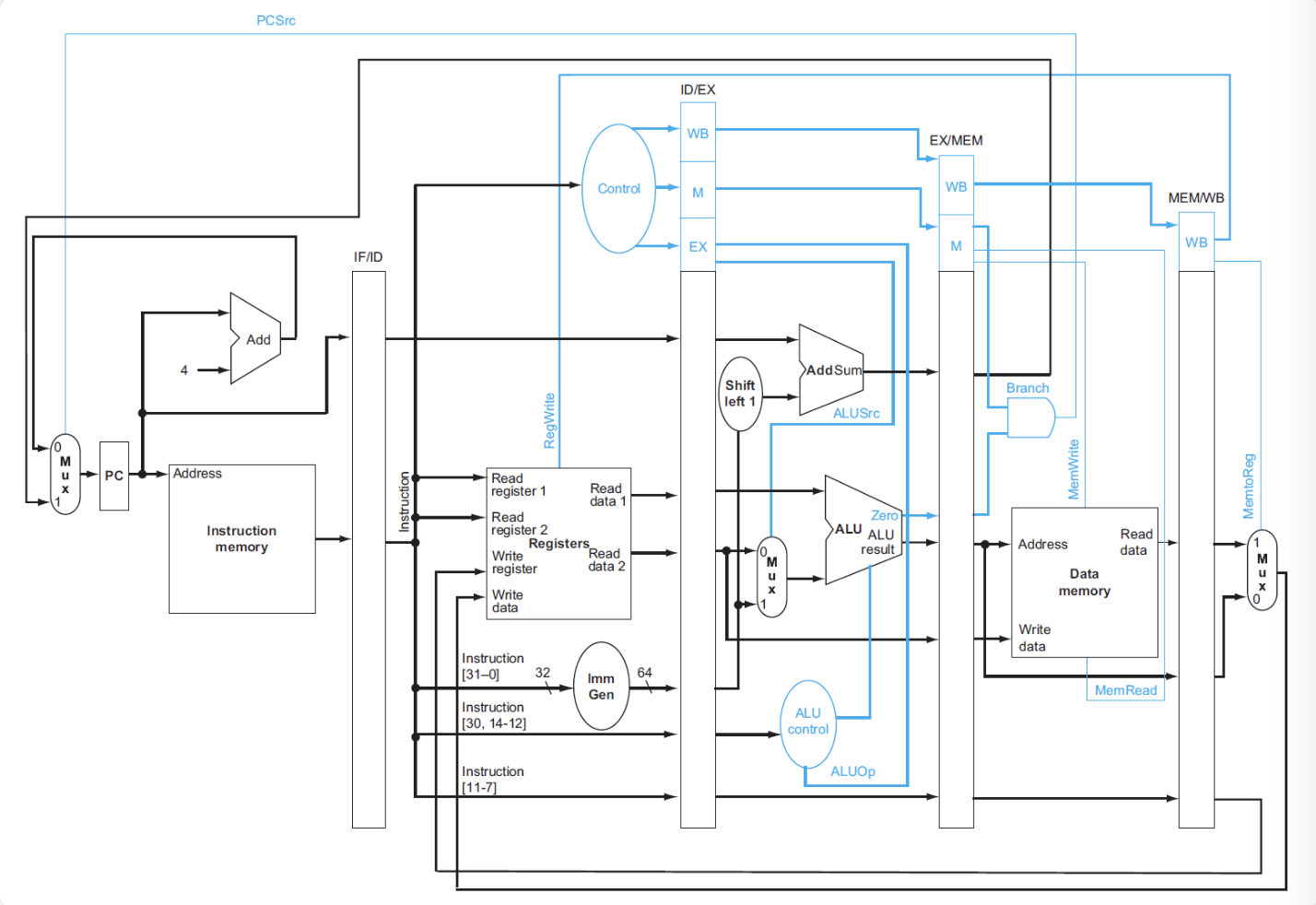
Data Harzards Fixing¶
data hazard的解决方法有两种,一种是进行前递forwarding,另一种是进行停顿stall
Forwarding¶
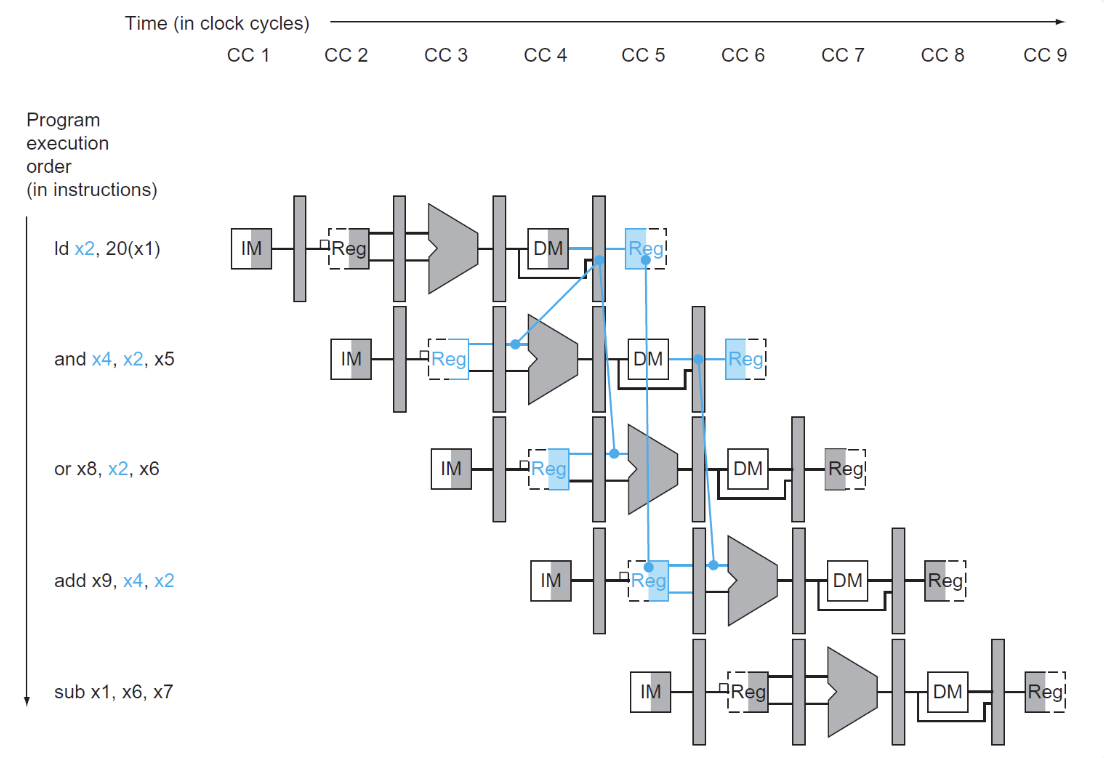
画出流水线图:
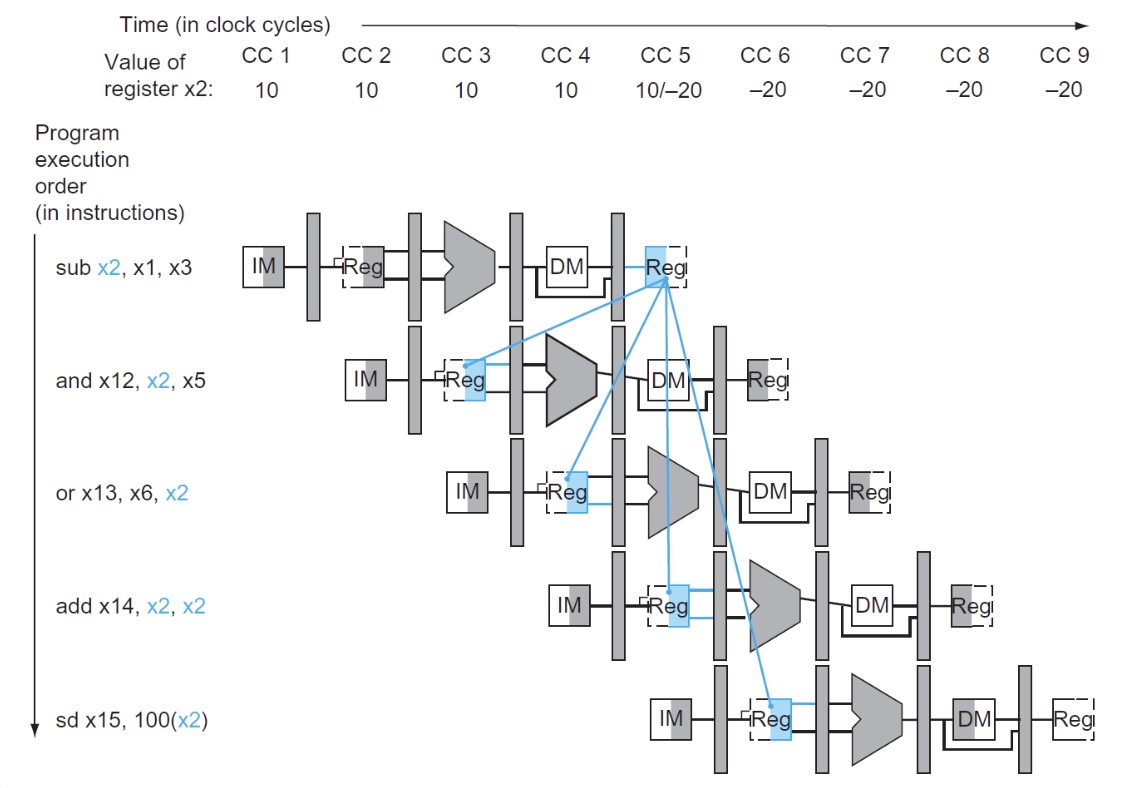
图中下方四个蓝色的寄存器是需要前递数据的寄存器,在正常情况下,我们得到最终的x2数值是在MEM/WB阶段,也就是图中所示第一个蓝色寄存器,但是显然上方的两个需要x2寄存器数值的指令无法前递,而我们在EX阶段其实已经得到了x2的数值,因此我们可以将x2的数值前递给上方两个指令
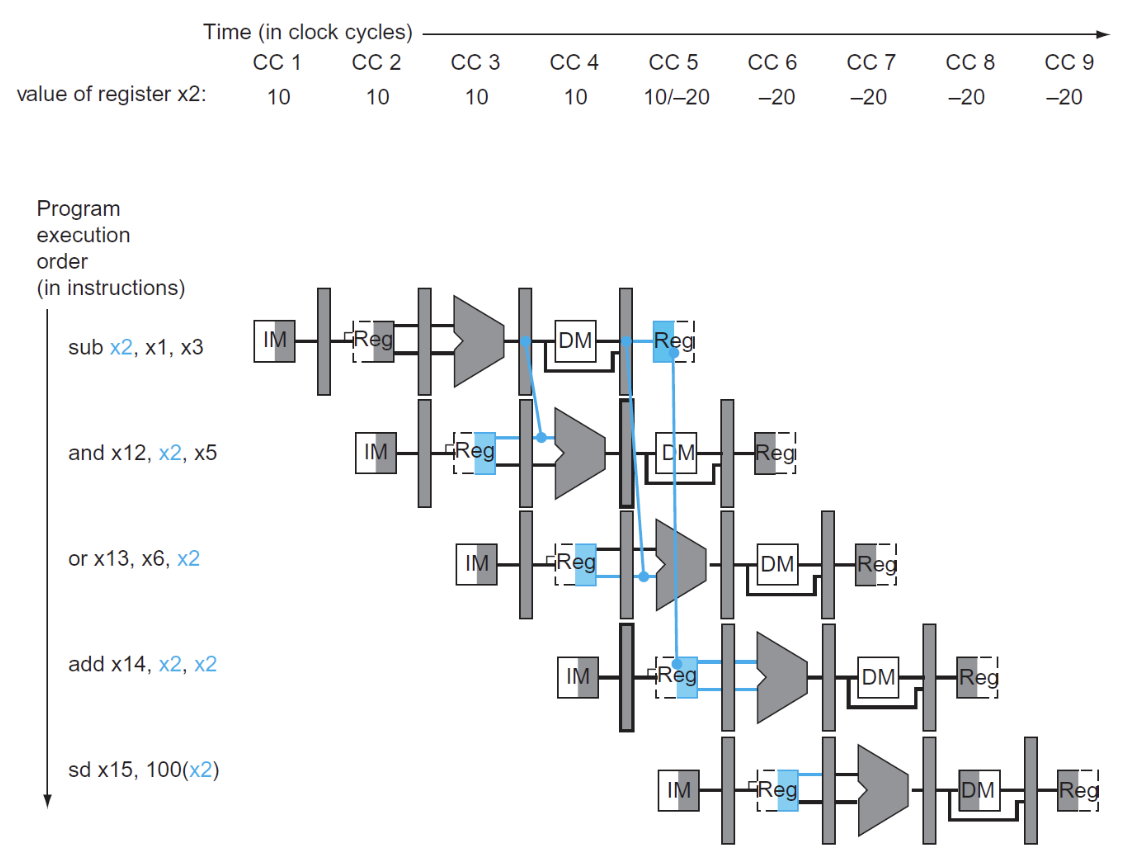
我们观察到两个前递的发生:
- "1"型是相邻的前递:
- "2"型是相邻两个指令之间的前递:
前递的判断
除了上述两个判断,还需要补充一些判断条件
- 并不是所有指令都包含写入寄存器的操作,所以提前检测
RegWrite信号是否为1,不是的话直接不用前递 -
如果目标寄存器的数值是0,我们不希望进行前递,因为0值的寄存器没有任何意义
-
同样还需要注意的是dubble data harzard,如果连续三条指令都在使用同一个寄存器,那么我们只需要对最新的指令进行前递,例如下面的指令:
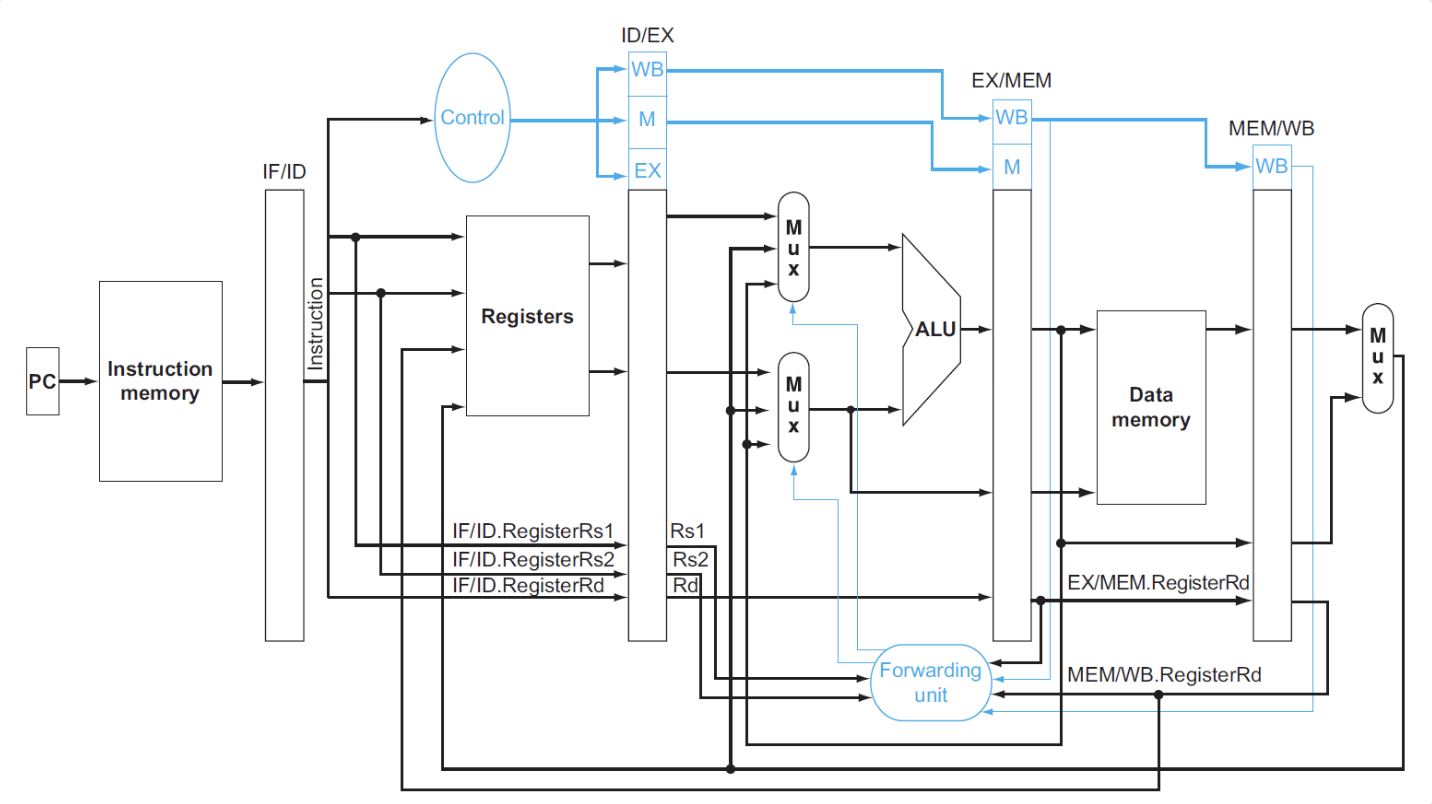
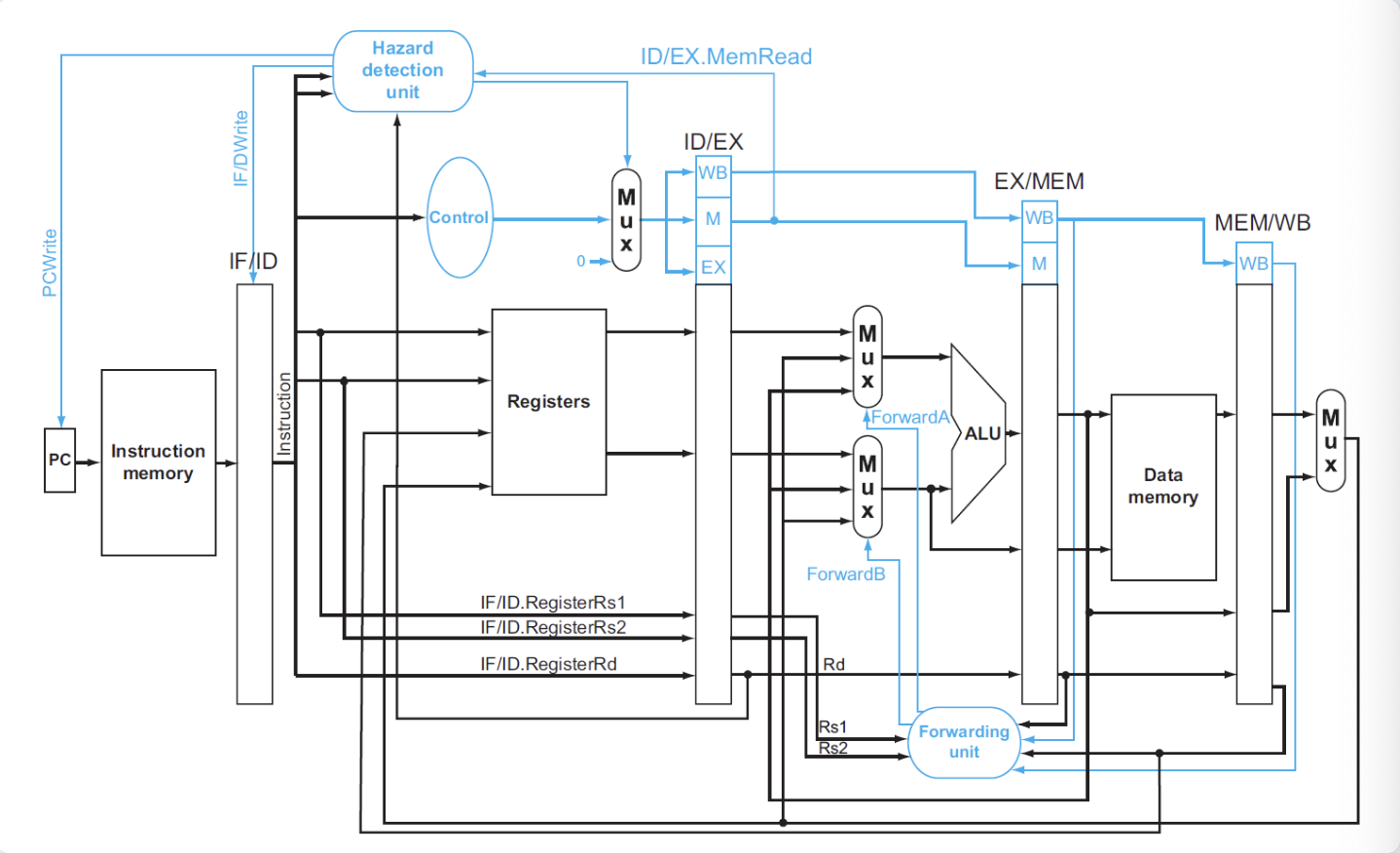
最终我们可以将整个forwarding unit的逻辑写成一个大的判断模块:
//For EX to ID
if (EX/MEM.RegWrite == 1 and EX/MEM.RegRd != 0)
if (EX/MEM.RegRd == ID/EX.RegRs1)
ForwardA = 10
if (EX/MEM.RegRd == ID/EX.RegRs2)
ForwardB = 10
//For MEM to ID
if (MEM/WB.RegWrite == 1 and MEM/WB.RegRd != 0)
and not (EX/MEM.RegWrite == 1 and (EX/MEM.RegRd == ID/EX.RegRs1 or EX/MEM.RegRd == ID/EX.RegRs2))
if (MEM/WB.RegRd == ID/EX.RegRs1)
ForwardA = 01
if (MEM/WB.RegRd == ID/EX.RegRs2)
ForwardB = 01
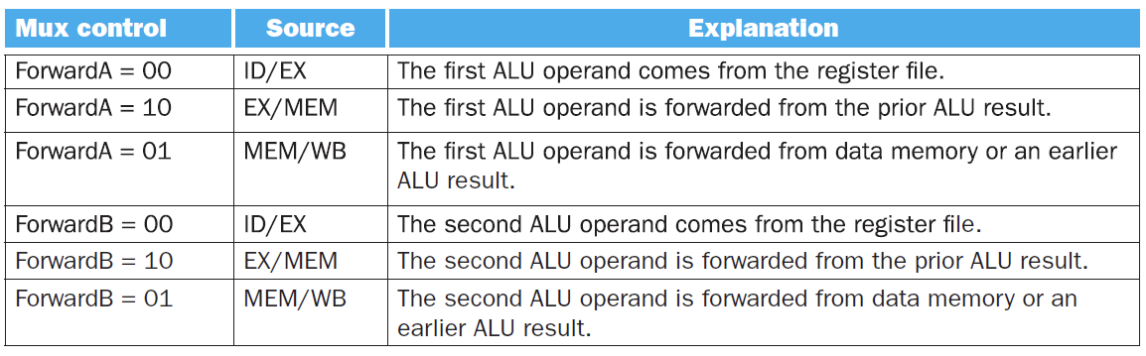
我们在这段判读中使用了ForwardA和ForwardB来表示前递的类型,其实就是添加一个Mux来选择ALU的输入位置是A还是B
这样我们就得到了完整的datapath:
Stalling¶
先前我们讲到过,当发生load-use data hazard时,我们需要进行停顿,也就是插入stall,这是为什么呢?
load-use data hazard
可以看到在ld指令得到数据的位置是在MEM/WB阶段,这样我们就不能在ALU计算出结果(imm + x1 的地址)后的直接拿出,因为ALU的计算结果地址从内存中读取的数据才是x2的值
这时无论怎样前递都达不到目的,只能添加一个stall
给出判断条件:
- 我在学习这里时并没有很理解,因为在上面的示例中,我们是看到了ld指令执行结束后的情况,但其实在ld指令执行到ID/EX阶段时,add指令就已经译码完成了,我们在CC2-CC3这个时刻就已经要进行判断
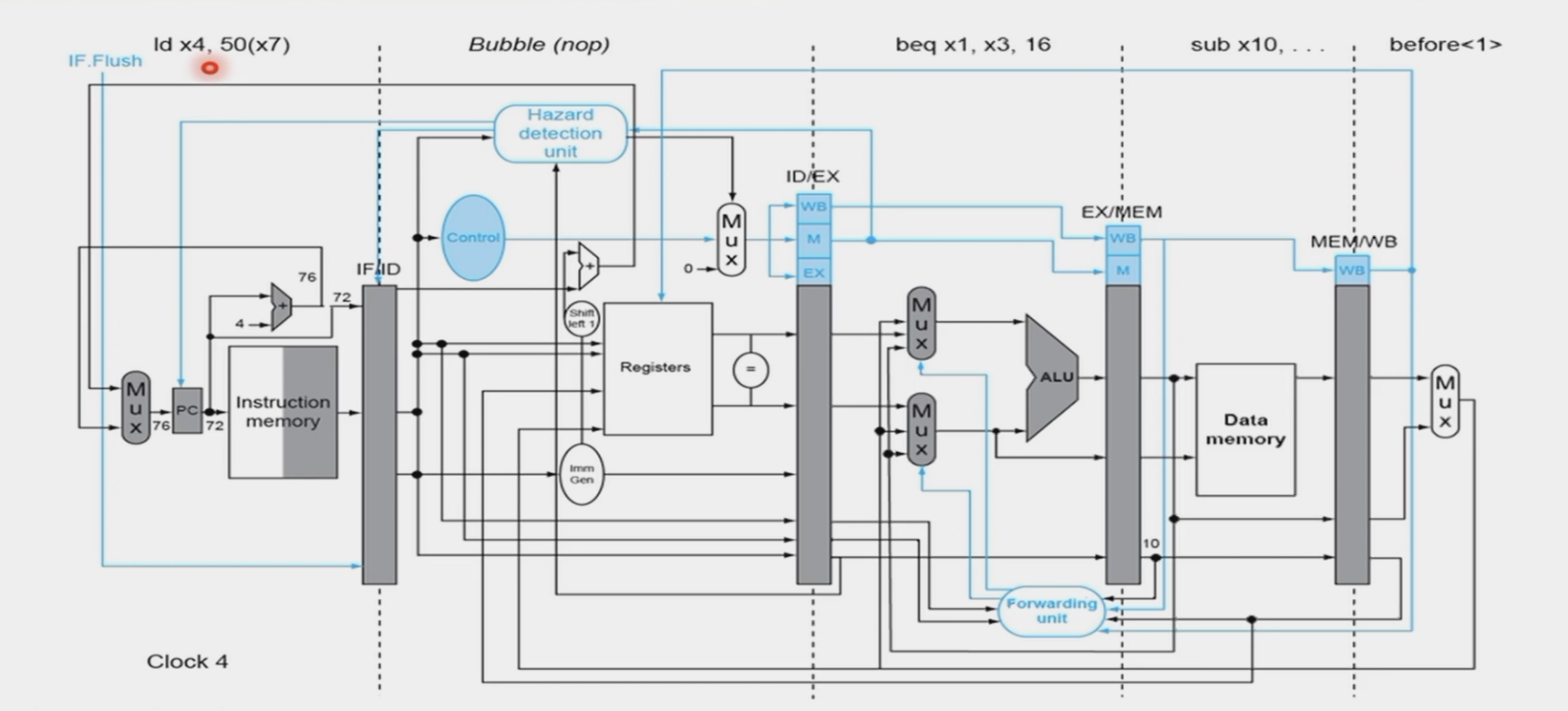
这样我们stall后的流水线进程就变为了:
hygg的作业题中这张图片不错,对齐的是每个指令阶段,这样就很容易看出stall的插入位置,向hygg学习()
接下来我们来解决怎么进行stall:
- 停止IF:不能改变PC寄存器的数值(进行重复读取),所以要为 PC 寄存器添加写信号
PCWrite - 停止ID:不能改变 IF/ID 流水线寄存器的值(读取重复的值)所以要为该寄存器添加写信号
IF/IDWrite - 确保空操作nops:保证流水线不改变状态,需要让所有的控制信号为0(实际上只需要
RegWrite和MemWrite为0,其他无所谓)
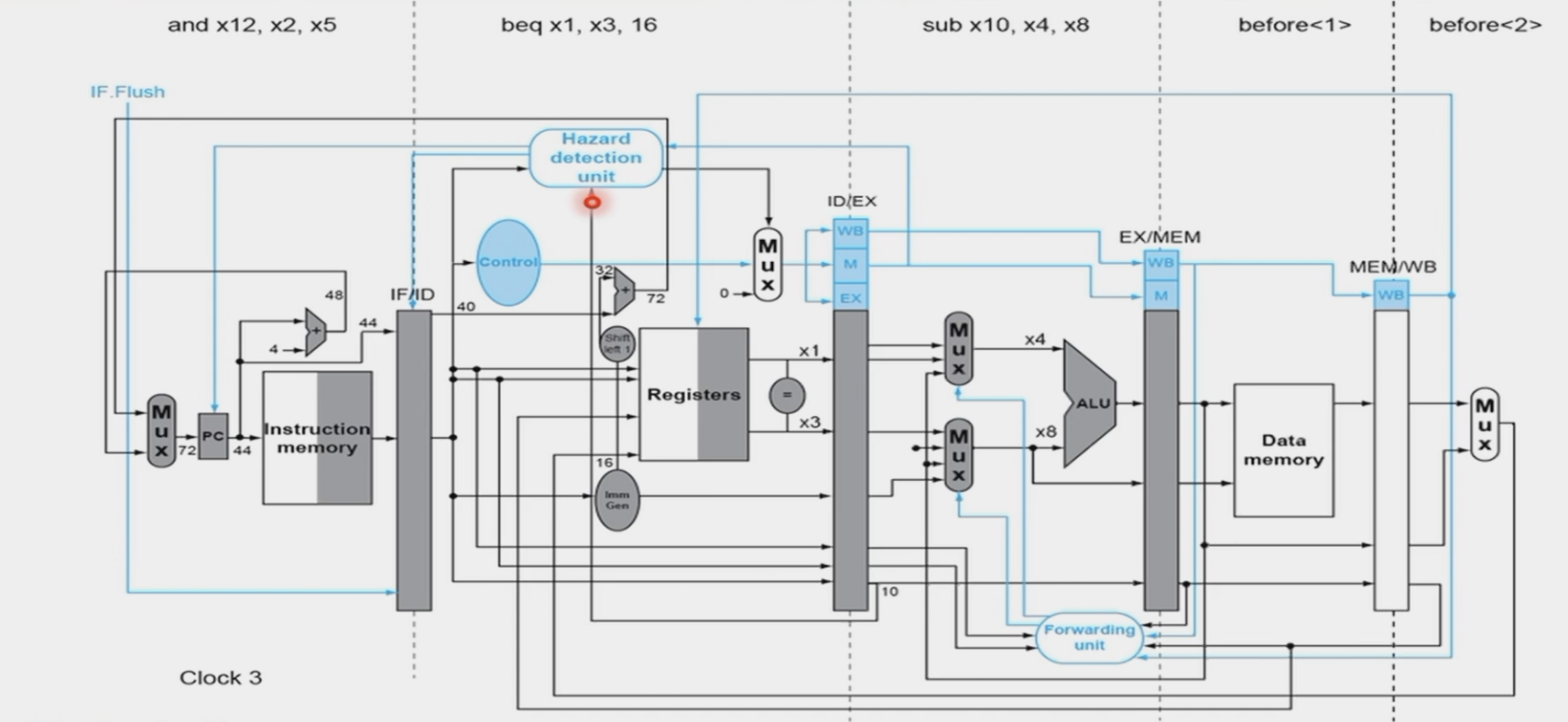
Control Hazards Fixing¶
如图,在beq指令中,我们正常情况下需要在WB阶段才能知道beq指令的执行结果,这之中会有三个指令的执行(被浪费),因此分支指令的优化是很重要的
- 一个思路是:Calculate in advance
正常情况下用ALU来计算出beq指令的地址,但实际上在ID阶段已经有imm和x1的值了,所以我们在ID阶段后增加一个专门的分支加法器就可以提前算出,可以减少两个指令的浪费
- 一个更好的思路是:Branch Prediction,有两种
- Static Prediction
- Dynamic Prediction
静态预测就是一直认为自己跳转或者不跳转,动态预测则是根据历史情况进行判断
1-bit predictor:
用0 1来区别上次的分支指令是否发生跳转,如果预测失败,反转这个bit。
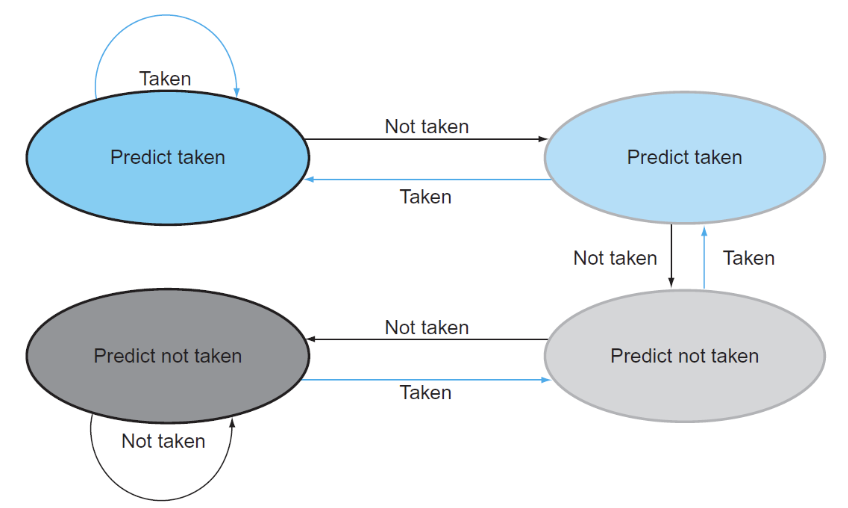
2-bit predictor:
相当于只有连续两次判断错误才会更改判断,可以优化while loop的犯错次数
留言