Equivariant¶
Equivariant 等变性是物理中的一个关键性质,在物理中,等变性是指物理定律在某种变换下保持不变。例如,牛顿第二定律在平移变换下保持不变,这就是等变性。在物理中,等变性是物理定律的数学表达,是物理定律的数学基础。
Mathematical Definition
令\(G\)是一个抽象群,\(g \in G\),我们说一个变换函数(或神经网络层)\(\phi: X \to Y\)是\(g\)等变的,如果:
对于一个在\(X\)上定义的变换函数\(T_g: X \to X\)对应存在一个在输出空间\(Y\)上的等价变换函数\(S_g: Y \to Y\),使得:
这里讨论三种等变性:
-
Translation 平移等变性:将输入平移会导致输出产生相对应的平移。
\[ \mathbf{y} + \mathcal{g} = \phi(\mathbf{x} + \mathcal{g}) \] -
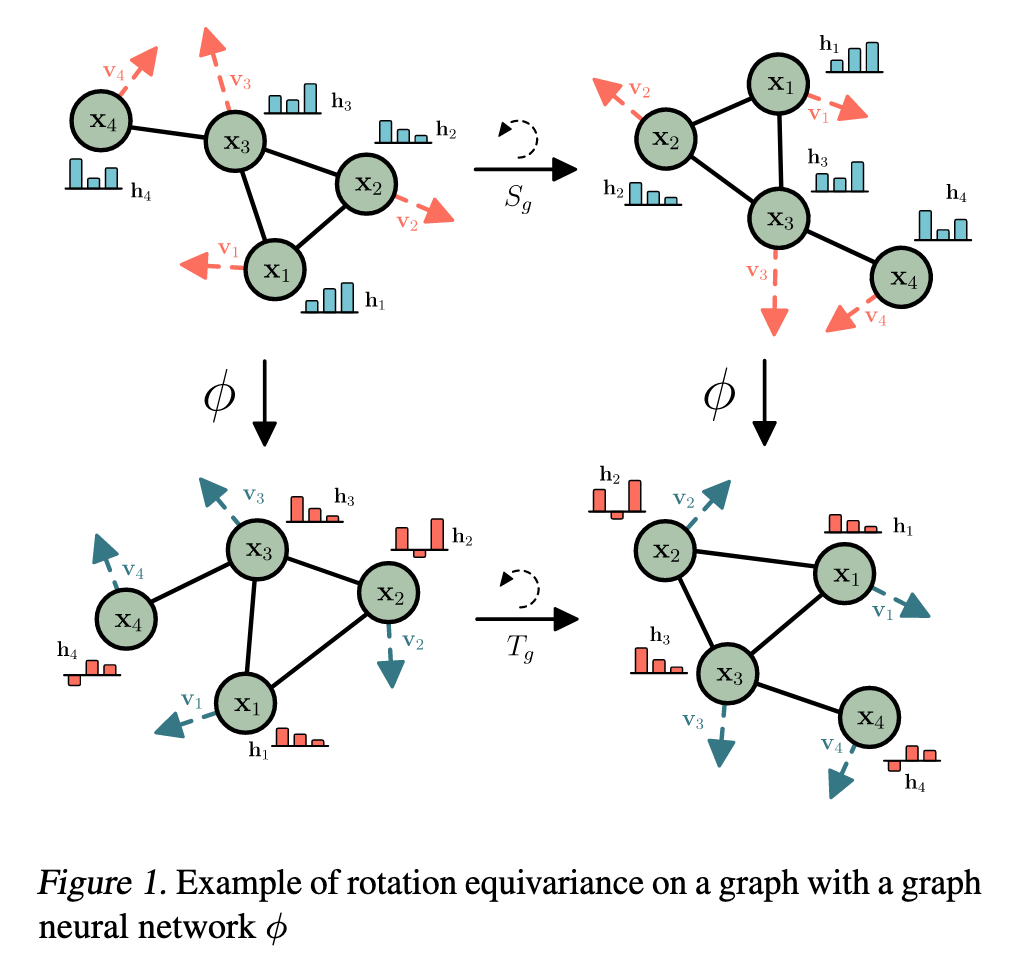
Rotation 旋转等变性:将输入旋转会导致输出产生相对应的旋转。
对于任何正交矩阵\(Q\),令 \(Qx=(Qx_1, \dots, Qx_n)\),那么:
\[ Qy = \phi(Qx) \] -
Permutation 置换等变性:
\[ P(y) = \phi(P(x)) \]其中\(P\)是行索引上的置换
GNN是置换等变的。
首先了解一下什么是EGNN,EGNN相当于是零件,用于构建一个等变的图理解器,而EDM则是用这个零件组装出一个强大的分子生成机器。
EGNN¶
Abstract
GNN在处理图数据时具有很强的表达能力,但是GNN的问题在于只关心拓扑关系(节点之间的连接),而忽略了节点的几何信息(节点的位置)。如果我们要设计一个既能注意拓扑也能注意几何信息的网络,那么他必须具备等变性。
Summary
EGNN通过引入GNN节点中所不具有的节点位置\(x_i\),并将其纳入图卷积层的更新方式来使得GNN具有等变性。
我们来看一下具体的实现方法:
Note
这里放一下同一notation下两种更新算法
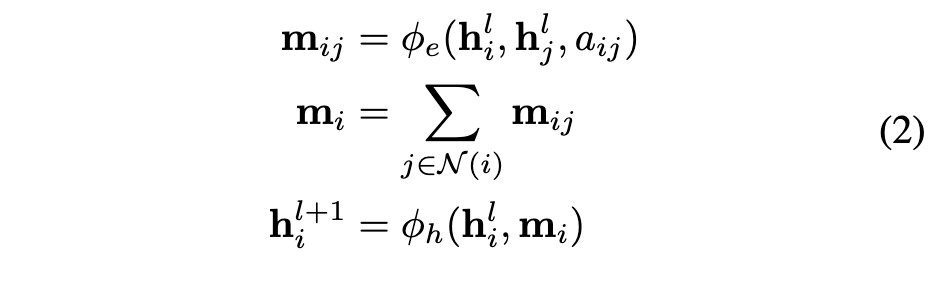
主要区别就是在对于消息传递的更新上,以及补充了一下我们加入的位置坐标的更新方式
-
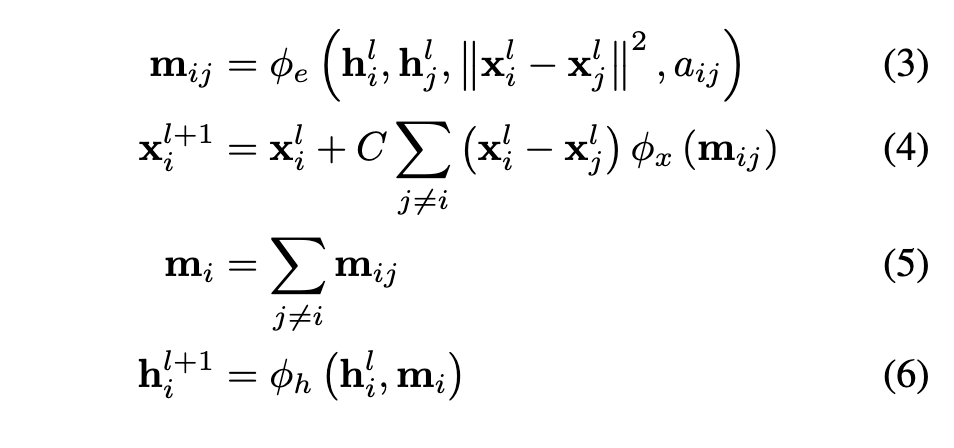
(3)
在边操作\(\phi_e\)中,我们加入了节点之间位置距离的平方项\(||x_i-x_j||^2\),而距离的平方是一个标量,对于旋转和位移是不变的(invariant)。其余的信息与GNN一致都是标量,所以输出的消息也是不变的。
-
(4)
对于位置的更新十分重要。在这个公式中,每个粒子的位置是通过所有相对差值的加权和来更新的,这个权重由位置操作函数\(\phi_x: \mathbb{R}^d \to \mathbb{R}^1\)来计算,输入得到的消息信息,输出一个标量值。C被选为\(\frac{1}{M-1}\)。而其中的向量差的合,因为是等变向量,所以整个式子是等变✖️不变,依然是等变的。
EDM¶
Abstract
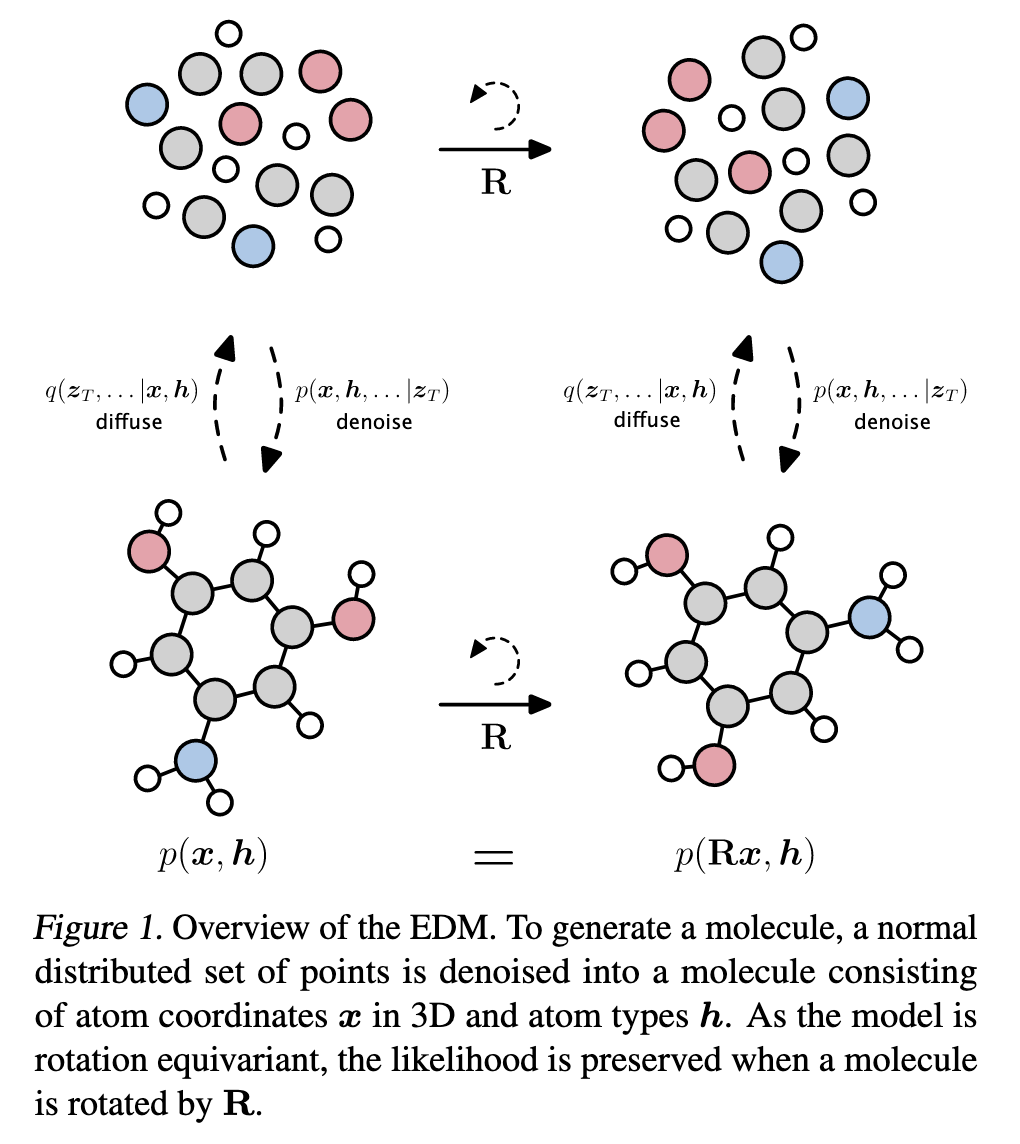
扩散模型在图像上可以取的巨大成功,离不开图像的数据结构本质——grid上的连续值(像素)。而分子本身是无序的点云(unordered point cloud),每个点(atom)包含两个信息:连续坐标和离散元素类别,同时图像往往只要求平移不变性,而分子必须要求有E(3)对称性,即生成过程和结果不能因为你旋转或平移了坐标系而改变。
这时我们的任务就不仅仅是还原噪声,更应该知道每个零件是什么,应该放在哪儿,并且构筑过程中不能因为观察者更换视角而改变。
Summary
完全针对分子设计定制的扩散模型,结合了位置连续信息\(x\)和离散元素类别\(h\),使用EGNN作为神经网络\(\epsilon_\theta\),保证了等变性。
在对Diffusion模型的等变性进行分析时,首先要知道我们的等变性主体对象是概率分布:
Equivariance of Probability Distributions
一个条件概率分布是等变的,如果:
一个概率分布是不变的,如果:
然后我们需要知道为什么概率分布在经过EGNN \(\epsilon_\theta\) 处理后,会满足等变性:
这部分文章用了简短的一个段落来阐述
我们分三步解释这个原理:
1. 单步变换:一个等变的可逆的函数作用在一个不变的分布上时,这个分布不变。
2. 多步马尔可夫链:在等变转移概率中,状态转移的规则是等变的。
3. 应用到Diffusion:Diffusion起点的纯噪声\(p(z_T)\)是高斯分布,是一个不变分布,反向去噪的过程如果使用等变的神经网络,那么转移概率也是等变的,最终得到的分子分布也就是等变的。
Value
这段证明的价值在于:
- 保证正确性:不变初始分布以及等变转移过程保证了最终的分子分布是等变的。
- 避免学习坐标系偏见:模型学会的是分子的内在结构规律,而不是它们在空间中的偶然朝向。
- 泛化能力和效率:模型本身就是等变的,就不需要花费参数学习物理常识
Details of Model¶
Section 3
Points and Features
在E(3)中我们考虑point clouds \(\mathbf{x} = (x_1, \dots, x_M) \in \mathbb{R}^{M \times 3}\),且带有对应特征\(\mathbf{h} = (h_1, \dots, h_M) \in \mathbb{R}^{M \times nf}\),nf是特征的维度。
特征对于group transformation是不变的,但是坐标对于旋转、反射、平移是等变的。
在得到数据的表示方式后,我们对于这里使用的EGNN进行定义:
EGNN in EDM
在这里我们考虑所有原子之间的相互作用,因此假设一个全连接的图,每个节点\(v_i\)有对应的位置\(\mathbf{x}_i\)和特征\(\mathbf{h}_i\)。\(\mathbf{x^{l+1}}, \mathbf{h^{l+1}} = \text{EGCL}(\mathbf{x^l}, \mathbf{h^l})\) 定义如下:
- \(\widetilde{e}_{ij} = \phi_{inf}(m_{ij})\)是对边的注意力软估计
- 所有的可学习参数在\(\phi_e, \phi_h, \phi_x, \phi_{inf}\)中
- Diffusion Process
将\([·,·]\)定义为concatenation操作,我们定义等变noising process为在潜变量\(\mathbf{z_t} = [\mathbf{z_t^{(x)}}, \mathbf{z_t^{(h)}}]\)上:
center of gravity
在原文中提到这样一段话:
他提到我们的分子生成并非是可以在空间中随意移动的,因为如果想要保证平移不变,我们需要将概率分布在无限大的空间中平铺,这显然是不可能的。
所以我们采取的做法是不考虑平移,将质心直接放在(0,0,0)进行建模,方法是施加约束
此时我们不再关注分子的绝对位置,只需要考虑原子之间的相对位置
- Denoising Process
还是按照传统Diffusion的流程定义去噪过程,定义优化目标:
Dynamics¶
Section 3.2
这个公式给出了噪声的更新方式:
- 对特征信息,由于其具有不变性,可以加入时间信息\(t/T\)来调整不同步数的更新方式
- 位置信息的更新是一个残差更新,EGNN输出的结果减去后方的初始值得到的才是噪声
Zeroth Likelihood Term¶
Section 3.3
经过denoising后,我们得到的就是最终的连续状态\(\mathbf{z}_0 = [\mathbf{z}_0^{(x)}, \mathbf{z}_0^{(h)}]\)
但是分子是由离散的原子类型+整数电荷+连续坐标组成的,现在我们分别讨论他们如何得到
- 电荷
直接采用四舍五入的方式进行估算
因为去噪最后一步的噪声的值非常小,或者说加噪过程的第一步噪声非常小,所以我们认为在这一步的后验概率\(q(\mathbf{h}|\mathbf{z}_0^{(h)})\)会无限接近1,这就告诉我们模型的输出值\(\mathbf{z}_0^{(h)}\)已经非常接近真实值\(\mathbf{h}\),所以我们可以直接采用四舍五入的方式找到他最接近的那个h
- 原子类型
在刚才电荷问题的讨论中,我们会想0.5是一个介于0和1之间的数值,如果元素也是按照这个思路,那我们很可能会让模型觉得N是一个介于C和O的中间体,这种bias是没有道理的,所以我们用独热编码来处理这种离散的数据类型,然后在这个categorical distribution中选择最大值
- 坐标
对于连续的坐标,我们的处理方式如下:
从最原始的公式出发,我们有\(\mathbf{z}_0^{(x)} = \alpha_0\mathbf{x}_0 + \sigma_0\epsilon^(x)\),这样其实已经可以反解出来一个真实的坐标,但由于我们不知道确切的噪声项\(\epsilon^(x)\),所以x的最佳估计值就是概率中心\(\mathbf{z}_0^{(x)}/\alpha_0\),也就是文中的公式:
但是empirically,作者发现了一个更好的方法,在最后一步再多预测一次噪声\(\epsilon_0^{(x)}\),用这个噪声作为原始结果的修正项进行微调:
这样做的另一个好处是可以统一了t=0时的优化目标
留言